So beweisen Sie, dass Vektoren linear unabhängig sind. Lineare Abhängigkeit eines Vektorsystems. Kollineare Vektoren
Lineare Abhängigkeit und lineare Unabhängigkeit von Vektoren.
Basis von Vektoren. Affines Koordinatensystem
Im Auditorium gibt es einen Wagen mit Pralinen, und heute bekommt jeder Besucher ein süßes Paar – analytische Geometrie mit linearer Algebra. In diesem Artikel werden zwei Abschnitte der höheren Mathematik gleichzeitig behandelt, und wir werden sehen, wie sie in einem Umschlag nebeneinander existieren. Machen Sie eine Pause, essen Sie ein Twix! ...verdammt, was für ein Unsinn. Obwohl, okay, ich werde nicht punkten, am Ende sollte man eine positive Einstellung zum Lernen haben.
Lineare Abhängigkeit von Vektoren, lineare Vektorunabhängigkeit, Vektorbasis und andere Begriffe haben nicht nur eine geometrische Interpretation, sondern vor allem eine algebraische Bedeutung. Der Begriff „Vektor“ selbst ist aus Sicht der linearen Algebra nicht immer der „gewöhnliche“ Vektor, den wir auf einer Ebene oder im Raum darstellen können. Sie müssen nicht lange nach Beweisen suchen, sondern versuchen, einen Vektor eines fünfdimensionalen Raums zu zeichnen ![]() . Oder der Wettervektor, für den ich gerade zu Gismeteo gegangen bin: – Temperatur und Atmosphärendruck jeweils. Das Beispiel ist aus Sicht der Eigenschaften des Vektorraums natürlich falsch, aber dennoch verbietet niemand die Formalisierung dieser Parameter als Vektor. Hauch des Herbstes...
. Oder der Wettervektor, für den ich gerade zu Gismeteo gegangen bin: – Temperatur und Atmosphärendruck jeweils. Das Beispiel ist aus Sicht der Eigenschaften des Vektorraums natürlich falsch, aber dennoch verbietet niemand die Formalisierung dieser Parameter als Vektor. Hauch des Herbstes...
Nein, ich werde Sie nicht mit der Theorie langweilen, lineare Vektorräume, die Aufgabe besteht darin verstehen Definitionen und Theoreme. Die neuen Begriffe (lineare Abhängigkeit, Unabhängigkeit, lineare Kombination, Basis usw.) gelten aus algebraischer Sicht für alle Vektoren, es werden jedoch geometrische Beispiele gegeben. Somit ist alles einfach, zugänglich und klar. Neben Problemen der analytischen Geometrie werden wir auch einige typische Algebraprobleme betrachten. Um den Stoff zu beherrschen, empfiehlt es sich, sich mit den Lektionen vertraut zu machen Vektoren für Dummies Und Wie berechnet man die Determinante?
Lineare Abhängigkeit und Unabhängigkeit ebener Vektoren.
Ebenenbasis und affines Koordinatensystem
Betrachten wir die Ebene Ihres Computertisches (nur ein Tisch, ein Nachttisch, ein Boden, eine Decke, was auch immer Sie möchten). Die Aufgabe besteht aus folgenden Aktionen:
1) Ebenenbasis auswählen. Grob gesagt hat eine Tischplatte eine Länge und eine Breite, daher ist es intuitiv, dass zwei Vektoren erforderlich sind, um die Basis zu konstruieren. Ein Vektor ist eindeutig nicht genug, drei Vektoren sind zu viel.
2) Basierend auf der ausgewählten Basis Koordinatensystem festlegen(Koordinatengitter), um allen Objekten auf dem Tisch Koordinaten zuzuweisen.
Seien Sie nicht überrascht, die Erklärungen werden zunächst auf der Hand liegen. Darüber hinaus auf Ihres. Bitte platzieren Zeigefinger linke Hand auf die Kante der Tischplatte legen, sodass er auf den Monitor schauen kann. Dies wird ein Vektor sein. Jetzt platzieren kleiner Finger rechte Hand
auf die gleiche Weise an der Tischkante anbringen – so dass es auf den Bildschirm gerichtet ist. Dies wird ein Vektor sein. Lächle, du siehst toll aus! Was können wir über Vektoren sagen? Datenvektoren kollinear, was bedeutet linear sich gegenseitig zum Ausdruck bringen:
, nun ja, oder umgekehrt: , wobei eine von Null verschiedene Zahl ist.
Ein Bild dieser Aktion können Sie im Unterricht sehen. Vektoren für Dummies, wo ich die Regel zum Multiplizieren eines Vektors mit einer Zahl erklärt habe.
Werden Ihre Finger die Basis auf der Ebene des Computertisches festlegen? Offensichtlich nicht. Kollineare Vektoren bewegen sich hin und her allein Richtung, und eine Ebene hat Länge und Breite.
Solche Vektoren heißen linear abhängig.
Referenz: Die Wörter „linear“, „linear“ bezeichnen die Tatsache, dass es in mathematischen Gleichungen und Ausdrücken keine Quadrate, Kubikzahlen, andere Potenzen, Logarithmen, Sinus usw. gibt. Es gibt nur lineare (1. Grad) Ausdrücke und Abhängigkeiten.
Zwei ebene Vektoren linear abhängig genau dann, wenn sie kollinear sind.
Kreuzen Sie Ihre Finger auf dem Tisch, sodass zwischen ihnen ein Winkel entsteht, der nicht 0 oder 180 Grad beträgt. Zwei ebene Vektorenlinear Nicht abhängig genau dann, wenn sie nicht kollinear sind. Damit ist die Basis erhalten. Es besteht kein Grund, sich zu schämen, dass sich herausstellte, dass die Basis mit nicht senkrechten Vektoren unterschiedlicher Länge „schief“ war. Sehr bald werden wir sehen, dass für seine Konstruktion nicht nur ein Winkel von 90 Grad geeignet ist und nicht nur Einheitsvektoren gleicher Länge
Beliebig Ebenenvektor der einzige Weg wird entsprechend der Basis erweitert: ![]() , wo sind reelle Zahlen. Die Nummern werden aufgerufen Vektorkoordinaten auf dieser Grundlage.
, wo sind reelle Zahlen. Die Nummern werden aufgerufen Vektorkoordinaten auf dieser Grundlage.
Das wird auch gesagt Vektordargestellt als lineare Kombination Basisvektoren. Das heißt, der Ausdruck heißt Vektorzerlegungnach Basis oder lineare Kombination Basisvektoren.
Wir können beispielsweise sagen, dass der Vektor entlang einer orthonormalen Basis der Ebene zerlegt wird, oder wir können sagen, dass er als lineare Kombination von Vektoren dargestellt wird.
Lassen Sie uns formulieren Definition der Basis formal: Die Basis des Flugzeugs heißt ein Paar linear unabhängiger (nicht kollinearer) Vektoren, , dabei beliebig Ein Ebenenvektor ist eine lineare Kombination von Basisvektoren.
Ein wesentlicher Punkt der Definition ist die Tatsache, dass die Vektoren genommen werden V in einer bestimmten Reihenfolge
. Basen ![]() – das sind zwei völlig unterschiedliche Grundlagen! Wie man so schön sagt, kann man nicht den kleinen Finger der linken Hand durch den kleinen Finger der rechten Hand ersetzen.
– das sind zwei völlig unterschiedliche Grundlagen! Wie man so schön sagt, kann man nicht den kleinen Finger der linken Hand durch den kleinen Finger der rechten Hand ersetzen.
Wir haben die Grundlage herausgefunden, aber es reicht nicht aus, ein Koordinatengitter festzulegen und jedem Gegenstand auf Ihrem Computertisch Koordinaten zuzuweisen. Warum reicht es nicht? Die Vektoren sind frei und wandern durch die gesamte Ebene. Wie ordnet man also den kleinen schmutzigen Stellen auf dem Tisch, die nach einem wilden Wochenende übrig bleiben, Koordinaten zu? Es braucht einen Ausgangspunkt. Und ein solcher Orientierungspunkt ist ein jedem bekannter Punkt – der Ursprung der Koordinaten. Lassen Sie uns das Koordinatensystem verstehen:
Ich beginne mit dem „Schul“-System. Schon in der Einführungslektion Vektoren für Dummies Ich habe einige Unterschiede zwischen dem rechtwinkligen Koordinatensystem und der Orthonormalbasis hervorgehoben. Hier ist das Standardbild:

Wenn sie darüber reden rechteckiges Koordinatensystem, dann meinen sie meistens den Ursprung, die Koordinatenachsen und den Maßstab entlang der Achsen. Versuchen Sie, „rechteckiges Koordinatensystem“ in eine Suchmaschine einzugeben, und Sie werden sehen, dass viele Quellen Ihnen Informationen zu Koordinatenachsen geben, die Sie aus der 5. bis 6. Klasse kennen, und wie Sie Punkte auf einer Ebene zeichnen.
Andererseits scheint es so rechteckiges System Koordinaten können vollständig auf Orthonormalbasis bestimmt werden. Und das ist fast wahr. Der Wortlaut lautet wie folgt:
Herkunft, Und orthonormal Die Basis ist gelegt Kartesisches rechtwinkliges Ebenenkoordinatensystem . Das heißt, das rechteckige Koordinatensystem definitiv wird durch einen einzelnen Punkt und zwei orthogonale Einheitsvektoren definiert. Deshalb sehen Sie die Zeichnung, die ich oben gegeben habe geometrische Probleme Oft (aber nicht immer) werden sowohl Vektoren als auch Koordinatenachsen gezeichnet.
Ich denke, jeder versteht, dass man einen Punkt (Ursprung) und eine Orthonormalbasis verwendet JEDER PUNKT im Flugzeug und JEDER VEKTOR im Flugzeug Koordinaten können zugewiesen werden. Bildlich gesprochen: „Alles im Flugzeug kann nummeriert werden.“
Müssen Koordinatenvektoren Einheiten sein? Nein, sie können eine beliebige Länge ungleich Null haben. Betrachten Sie Punkt und zwei orthogonaler Vektor beliebige Länge ungleich Null:

Eine solche Basis heißt senkrecht. Der Ursprung von Koordinaten mit Vektoren wird durch ein Koordinatengitter definiert, und jeder Punkt auf der Ebene, jeder Vektor hat seine Koordinaten auf einer bestimmten Basis. Zum Beispiel, oder. Der offensichtliche Nachteil besteht darin, dass die Koordinatenvektoren Im Algemeinen haben unterschiedliche Längen außer Eins. Wenn die Längen gleich eins sind, erhält man die übliche Orthonormalbasis.
! Notiz : In der orthogonalen Basis sowie weiter unten in den affinen Basen von Ebene und Raum werden Einheiten entlang der Achsen berücksichtigt BEDINGT. Eine Einheit entlang der x-Achse enthält beispielsweise 4 cm, eine Einheit entlang der Ordinatenachse enthält 2 cm. Diese Informationen reichen aus, um bei Bedarf „nicht standardmäßige“ Koordinaten in „unsere üblichen Zentimeter“ umzurechnen.
Und die zweite Frage, die eigentlich schon beantwortet wurde, ist, ob der Winkel zwischen den Basisvektoren gleich 90 Grad sein muss? Nein! Wie die Definition besagt, müssen die Basisvektoren sein nur nichtkollinear. Dementsprechend kann der Winkel alles außer 0 und 180 Grad betragen.
Ein Punkt auf der Ebene namens Herkunft, Und nichtkollinear Vektoren, , Satz affines Ebenenkoordinatensystem :

Manchmal wird ein solches Koordinatensystem aufgerufen schräg System. Die Zeichnung zeigt beispielhaft Punkte und Vektoren: 
Wie Sie verstehen, ist das affine Koordinatensystem noch weniger praktisch; die Formeln für die Längen von Vektoren und Segmenten, die wir im zweiten Teil der Lektion besprochen haben, funktionieren darin nicht Vektoren für Dummies, viele köstliche Formeln im Zusammenhang mit Skalarprodukt von Vektoren. Aber die Regeln zum Addieren von Vektoren und zum Multiplizieren eines Vektors mit einer Zahl, Formeln zum Teilen eines Segments in dieser Beziehung sowie einige andere Arten von Problemen, die wir bald betrachten werden, sind gültig.
Und die Schlussfolgerung ist, dass der bequemste Sonderfall eines affinen Koordinatensystems das kartesische Rechtecksystem ist. Deshalb musst du sie am häufigsten sehen, meine Liebe. ...Allerdings ist alles in diesem Leben relativ - es gibt viele Situationen, in denen ein schiefer Winkel (oder ein anderer zum Beispiel) Polar-) Koordinatensystem. Und Humanoiden könnten solche Systeme gefallen =)
Kommen wir zum praktischen Teil. Alle Aufgaben dieser Lektion gelten sowohl für das rechtwinklige Koordinatensystem als auch für den allgemeinen affinen Fall. Hier gibt es nichts Kompliziertes; das gesamte Material ist auch für ein Schulkind zugänglich.
Wie bestimmt man die Kollinearität von Ebenenvektoren?
Typische Sache. Damit gibt es zwei ebene Vektoren ![]() kollinear wären, ist es notwendig und ausreichend, dass ihre entsprechenden Koordinaten proportional sind Im Wesentlichen handelt es sich hierbei um eine Koordinaten-für-Koordinaten-Detaillierung der offensichtlichen Beziehung.
kollinear wären, ist es notwendig und ausreichend, dass ihre entsprechenden Koordinaten proportional sind Im Wesentlichen handelt es sich hierbei um eine Koordinaten-für-Koordinaten-Detaillierung der offensichtlichen Beziehung.
Beispiel 1
a) Überprüfen Sie, ob die Vektoren kollinear sind ![]() .
.
b) Bilden die Vektoren eine Basis? ![]() ?
?
Lösung:
a) Finden wir heraus, ob es Vektoren gibt ![]() Proportionalitätskoeffizient, so dass die Gleichheiten erfüllt sind:
Proportionalitätskoeffizient, so dass die Gleichheiten erfüllt sind: ![]()
Ich werde Ihnen auf jeden Fall von der „foppigen“ Variante der Anwendung dieser Regel erzählen, die in der Praxis recht gut funktioniert. Die Idee besteht darin, sofort das Verhältnis zu ermitteln und zu prüfen, ob es korrekt ist:
Machen wir einen Anteil aus den Verhältnissen der entsprechenden Koordinaten der Vektoren:
Kürzen wir:
, also sind die entsprechenden Koordinaten proportional, also
Die Beziehung könnte auch umgekehrt erfolgen; dies ist eine äquivalente Option:
Zum Selbsttest können Sie die Tatsache nutzen, dass kollineare Vektoren linear durcheinander ausgedrückt werden. IN in diesem Fall es gibt Gleichheiten ![]() . Ihre Gültigkeit lässt sich leicht durch elementare Operationen mit Vektoren überprüfen:
. Ihre Gültigkeit lässt sich leicht durch elementare Operationen mit Vektoren überprüfen: 
b) Zwei Ebenenvektoren bilden eine Basis, wenn sie nicht kollinear (linear unabhängig) sind. Wir untersuchen Vektoren auf Kollinearität ![]() . Lassen Sie uns ein System erstellen:
. Lassen Sie uns ein System erstellen: 
Aus der ersten Gleichung folgt, dass, aus der zweiten Gleichung folgt, was bedeutet Das System ist inkonsistent(keine Lösungen). Somit sind die entsprechenden Koordinaten der Vektoren nicht proportional.
Abschluss: Die Vektoren sind linear unabhängig und bilden eine Basis.
Eine vereinfachte Version der Lösung sieht so aus:
Machen wir einen Anteil aus den entsprechenden Koordinaten der Vektoren ![]() :
:
, was bedeutet, dass diese Vektoren linear unabhängig sind und eine Basis bilden.
Normalerweise wird diese Option von Gutachtern nicht abgelehnt, es entsteht jedoch ein Problem in Fällen, in denen einige Koordinaten gleich Null sind. So: ![]() . Oder so:
. Oder so: ![]() . Oder so:
. Oder so: ![]() . Wie geht man hier mit den Proportionen um? (tatsächlich kann man nicht durch Null dividieren). Aus diesem Grund habe ich die vereinfachte Lösung als „foppish“ bezeichnet.
. Wie geht man hier mit den Proportionen um? (tatsächlich kann man nicht durch Null dividieren). Aus diesem Grund habe ich die vereinfachte Lösung als „foppish“ bezeichnet.
Antwort: a) , b) bilden.
Ein kleines kreatives Beispiel für Ihre eigene Lösung:
Beispiel 2
Auf welchem Wert des Parameters liegen die Vektoren? ![]() Werden sie kollinear sein?
Werden sie kollinear sein?
In der Beispiellösung wird der Parameter durch den Anteil ermittelt.
Es gibt eine elegante algebraische Möglichkeit, Vektoren auf Kollinearität zu überprüfen. Systematisieren wir unser Wissen und fügen es als fünften Punkt hinzu:
Für zwei ebene Vektoren sind die folgenden Aussagen äquivalent:
2) die Vektoren bilden eine Basis;
3) die Vektoren sind nicht kollinear;
+ 5) Die aus den Koordinaten dieser Vektoren zusammengesetzte Determinante ist ungleich Null.
Jeweils, Die folgenden gegenteiligen Aussagen sind gleichwertig:
1) Vektoren sind linear abhängig;
2) Vektoren bilden keine Basis;
3) die Vektoren sind kollinear;
4) Vektoren können linear durcheinander ausgedrückt werden;
+ 5) eine Determinante, die sich aus den Koordinaten dieser Vektoren zusammensetzt, gleich Null
.
Das hoffe ich wirklich sehr dieser Moment Sie verstehen bereits alle Begriffe und Aussagen, die Ihnen begegnen.
Schauen wir uns den neuen, fünften Punkt genauer an: zwei ebene Vektoren ![]() sind genau dann kollinear, wenn die aus den Koordinaten der gegebenen Vektoren zusammengesetzte Determinante gleich Null ist:. Um diese Funktion nutzen zu können, müssen Sie natürlich dazu in der Lage sein Determinanten finden.
sind genau dann kollinear, wenn die aus den Koordinaten der gegebenen Vektoren zusammengesetzte Determinante gleich Null ist:. Um diese Funktion nutzen zu können, müssen Sie natürlich dazu in der Lage sein Determinanten finden.
Lass uns entscheiden Beispiel 1 auf die zweite Art:
a) Berechnen wir die Determinante, die aus den Koordinaten der Vektoren besteht ![]() :
:![]() , was bedeutet, dass diese Vektoren kollinear sind.
, was bedeutet, dass diese Vektoren kollinear sind.
b) Zwei Ebenenvektoren bilden eine Basis, wenn sie nicht kollinear (linear unabhängig) sind. Berechnen wir die Determinante aus Vektorkoordinaten ![]() :
:![]() , was bedeutet, dass die Vektoren linear unabhängig sind und eine Basis bilden.
, was bedeutet, dass die Vektoren linear unabhängig sind und eine Basis bilden.
Antwort: a) , b) bilden.
Es sieht viel kompakter und hübscher aus als eine Lösung mit Proportionen.
Mit Hilfe des betrachteten Materials ist es möglich, nicht nur die Kollinearität von Vektoren festzustellen, sondern auch die Parallelität von Strecken und Geraden nachzuweisen. Betrachten wir einige Probleme mit bestimmten geometrischen Formen.
Beispiel 3
Die Eckpunkte eines Vierecks sind angegeben. Beweisen Sie, dass ein Viereck ein Parallelogramm ist.
Nachweisen: Es ist nicht erforderlich, im Problem eine Zeichnung zu erstellen, da die Lösung rein analytischer Natur ist. Erinnern wir uns an die Definition eines Parallelogramms:
Parallelogramm
Ein Viereck, dessen gegenüberliegende Seiten paarweise parallel sind, heißt.
Somit ist zu beweisen:
1) Parallelität gegenüberliegender Seiten und;
2) Parallelität gegenüberliegender Seiten und.
Wir beweisen:
1) Finden Sie die Vektoren: 
![]()
2) Finden Sie die Vektoren: 
Das Ergebnis ist der gleiche Vektor („je nach Schule“ – gleiche Vektoren). Kollinearität ist ziemlich offensichtlich, aber es ist besser, die Entscheidung klar und arrangiert zu formalisieren. Berechnen wir die Determinante aus Vektorkoordinaten: ![]() , was bedeutet, dass diese Vektoren kollinear sind, und .
, was bedeutet, dass diese Vektoren kollinear sind, und .
Abschluss: Die gegenüberliegenden Seiten eines Vierecks sind paarweise parallel, es handelt sich also per Definition um ein Parallelogramm. Q.E.D.
Weitere gute und unterschiedliche Figuren:
Beispiel 4
Die Eckpunkte eines Vierecks sind angegeben. Beweisen Sie, dass ein Viereck ein Trapez ist.
Für eine genauere Formulierung des Beweises ist es natürlich besser, die Definition eines Trapezes zu erhalten, aber es reicht aus, sich einfach daran zu erinnern, wie es aussieht.
Dies ist eine Aufgabe, die Sie selbst lösen müssen. Vollständige Lösung am Ende der Lektion.
Und nun geht es langsam vom Flugzeug in den Weltraum:
Wie bestimmt man die Kollinearität von Raumvektoren?
Die Regel ist sehr ähnlich. Damit zwei Raumvektoren kollinear sind, ist es notwendig und ausreichend, dass ihre entsprechenden Koordinaten proportional sind.
Beispiel 5
Finden Sie heraus, ob die folgenden Raumvektoren kollinear sind:
A) ;
B)
V) ![]()
Lösung:
a) Prüfen wir, ob es einen Proportionalitätskoeffizienten für die entsprechenden Koordinaten der Vektoren gibt:
Das System hat keine Lösung, was bedeutet, dass die Vektoren nicht kollinear sind.
„Vereinfacht“ wird durch die Prüfung der Proportionen formalisiert. In diesem Fall:
– Die entsprechenden Koordinaten sind nicht proportional, das heißt, die Vektoren sind nicht kollinear.
Antwort: die Vektoren sind nicht kollinear.
b-c) Dies sind Punkte für eine unabhängige Entscheidung. Probieren Sie es auf zwei Arten aus.
Es gibt eine Methode zur Überprüfung räumlicher Vektoren auf Kollinearität mithilfe einer Determinante dritter Ordnung. Diese Methode wird im Artikel behandelt Vektorprodukt von Vektoren.
Ähnlich wie im ebenen Fall kann mit den betrachteten Werkzeugen die Parallelität von Raumsegmenten und Geraden untersucht werden.
Willkommen zum zweiten Abschnitt:
Lineare Abhängigkeit und Unabhängigkeit von Vektoren im dreidimensionalen Raum.
Raumbasis und affines Koordinatensystem
Viele der Muster, die wir im Flugzeug untersucht haben, gelten auch für den Weltraum. Ich habe versucht, die theoretischen Anmerkungen zu minimieren, da der Löwenanteil der Informationen bereits gekaut wurde. Ich empfehle Ihnen jedoch, den Einführungsteil sorgfältig zu lesen, da neue Begriffe und Konzepte auftauchen.
Anstelle der Ebene des Computertisches erkunden wir nun den dreidimensionalen Raum. Lassen Sie uns zunächst die Grundlage schaffen. Jemand ist jetzt drinnen, jemand draußen, aber auf jeden Fall können wir uns den drei Dimensionen Breite, Länge und Höhe nicht entziehen. Um eine Basis zu konstruieren, sind daher drei räumliche Vektoren erforderlich. Ein oder zwei Vektoren reichen nicht aus, der vierte ist überflüssig.
Und wieder wärmen wir uns an den Fingern auf. Bitte heben Sie Ihre Hand hoch und spreizen Sie sie in verschiedene Richtungen Daumen, Zeigefinger und Mittelfinger . Dabei handelt es sich um Vektoren, sie schauen in unterschiedliche Richtungen, haben unterschiedliche Längen und weisen untereinander unterschiedliche Winkel auf. Herzlichen Glückwunsch, die Basis des dreidimensionalen Raums ist fertig! Das muss man den Lehrern übrigens nicht demonstrieren, egal wie sehr man die Finger verdreht, aber es gibt kein Entrinnen vor Definitionen =)
Stellen wir uns als Nächstes eine wichtige Frage: Bilden drei beliebige Vektoren eine Basis des dreidimensionalen Raums?? Bitte drücken Sie mit drei Fingern fest auf die Oberseite des Computertisches. Was ist passiert? Drei Vektoren liegen in derselben Ebene, und grob gesagt haben wir eine der Dimensionen verloren – die Höhe. Solche Vektoren sind koplanar und es ist ganz offensichtlich, dass die Grundlage des dreidimensionalen Raums nicht geschaffen ist.
Es ist zu beachten, dass koplanare Vektoren nicht in derselben Ebene liegen müssen, sondern in parallelen Ebenen liegen können (tun Sie dies nur nicht mit den Fingern, nur Salvador Dali hat dies getan =)).
Definition: Vektoren werden aufgerufen koplanar, wenn es eine Ebene gibt, zu der sie parallel sind. Es ist logisch, hier hinzuzufügen, dass die Vektoren nicht koplanar sind, wenn eine solche Ebene nicht existiert.
Drei koplanare Vektoren sind immer linear abhängig, das heißt, sie werden linear durcheinander ausgedrückt. Stellen wir uns der Einfachheit halber noch einmal vor, dass sie in derselben Ebene liegen. Erstens sind Vektoren nicht nur koplanar, sie können auch kollinear sein, sodass jeder Vektor durch jeden Vektor ausgedrückt werden kann. Im zweiten Fall, wenn beispielsweise die Vektoren nicht kollinear sind, wird der dritte Vektor auf einzigartige Weise durch sie ausgedrückt: ![]() (und warum, lässt sich anhand der Materialien im vorherigen Abschnitt leicht erraten).
(und warum, lässt sich anhand der Materialien im vorherigen Abschnitt leicht erraten).
Das Umgekehrte gilt auch: Drei nicht koplanare Vektoren sind immer linear unabhängig, das heißt, sie kommen in keiner Weise durcheinander zum Ausdruck. Und natürlich können nur solche Vektoren die Grundlage des dreidimensionalen Raums bilden.
Definition: Die Grundlage des dreidimensionalen Raums heißt ein Tripel linear unabhängiger (nicht koplanarer) Vektoren, in einer bestimmten Reihenfolge aufgenommen und jeder Raumvektor der einzige Weg wird über eine gegebene Basis zerlegt, wobei die Koordinaten des Vektors in dieser Basis sind
Ich möchte Sie daran erinnern, dass wir auch sagen können, dass der Vektor in der Form dargestellt wird lineare Kombination Basisvektoren.
Das Konzept eines Koordinatensystems wird genauso eingeführt wie für den ebenen Fall; ein Punkt und drei beliebige linear unabhängige Vektoren genügen:
Herkunft, Und nicht koplanar Vektoren, in einer bestimmten Reihenfolge aufgenommen, Satz affines Koordinatensystem des dreidimensionalen Raums
:
Natürlich ist das Koordinatengitter „schräg“ und unpraktisch, aber das konstruierte Koordinatensystem erlaubt es uns dennoch definitiv Bestimmen Sie die Koordinaten eines beliebigen Vektors und die Koordinaten eines beliebigen Punktes im Raum. Ähnlich wie bei einer Ebene funktionieren einige Formeln, die ich bereits erwähnt habe, im affinen Koordinatensystem des Raums nicht.
Der bekannteste und praktischste Sonderfall eines affinen Koordinatensystems ist, wie jeder vermutet rechteckiges Raumkoordinatensystem:
Ein Punkt im Raum namens Herkunft, Und orthonormal Die Basis ist gelegt Kartesisches rechteckiges Raumkoordinatensystem
. Bekanntes Bild: 
Bevor wir zu praktischen Aufgaben übergehen, systematisieren wir die Informationen noch einmal:
Für drei Raumvektoren sind die folgenden Aussagen äquivalent:
1) die Vektoren sind linear unabhängig;
2) die Vektoren bilden eine Basis;
3) die Vektoren sind nicht koplanar;
4) Vektoren können nicht linear durcheinander ausgedrückt werden;
5) Die Determinante, bestehend aus den Koordinaten dieser Vektoren, ist von Null verschieden.
Ich denke, die gegenteiligen Aussagen sind verständlich.
Die lineare Abhängigkeit/Unabhängigkeit von Raumvektoren wird traditionell anhand einer Determinante überprüft (Punkt 5). Die übrigen praktischen Aufgaben werden einen ausgeprägten algebraischen Charakter haben. Es ist Zeit, den Geometrie-Stick an den Nagel zu hängen und den Baseballschläger der linearen Algebra zu schwingen:
Drei Raumvektoren sind genau dann koplanar, wenn die aus den Koordinaten der gegebenen Vektoren zusammengesetzte Determinante gleich Null ist:  .
.
Ich möchte Sie auf eine kleine technische Nuance aufmerksam machen: Die Koordinaten von Vektoren können nicht nur in Spalten, sondern auch in Zeilen geschrieben werden (der Wert der Determinante ändert sich dadurch nicht - siehe Eigenschaften von Determinanten). Aber in Kolumnen ist es viel besser, da es für die Lösung einiger praktischer Probleme nützlicher ist.
Für diejenigen Leser, die die Methoden zur Berechnung von Determinanten ein wenig vergessen haben oder vielleicht überhaupt kein Verständnis dafür haben, empfehle ich eine meiner ältesten Lektionen: Wie berechnet man die Determinante?
Beispiel 6
Prüfen Sie, ob die folgenden Vektoren die Grundlage des dreidimensionalen Raums bilden:
Lösung: Tatsächlich besteht die gesamte Lösung darin, die Determinante zu berechnen.
a) Berechnen wir die Determinante aus Vektorkoordinaten (die Determinante wird in der ersten Zeile angezeigt): 
, was bedeutet, dass die Vektoren linear unabhängig (nicht koplanar) sind und die Grundlage des dreidimensionalen Raums bilden.
Antwort: Diese Vektoren bilden eine Basis
b) Dies ist ein Punkt für eine unabhängige Entscheidung. Vollständige Lösung und Antwort am Ende der Lektion.
Es gibt auch kreative Aufgaben:
Beispiel 7
Bei welchem Wert des Parameters sind die Vektoren koplanar?
Lösung: Vektoren sind genau dann koplanar, wenn die aus den Koordinaten dieser Vektoren zusammengesetzte Determinante gleich Null ist: 
Im Wesentlichen müssen Sie eine Gleichung mit einer Determinante lösen. Wir stürzen uns auf Nullen wie Drachen auf Springmäuse – am besten öffnet man die Determinante in der zweiten Zeile und entfernt sofort die Minuspunkte: 
Wir nehmen weitere Vereinfachungen vor und reduzieren den Sachverhalt auf die einfachste lineare Gleichung: ![]()
Antwort: bei
Dies lässt sich leicht überprüfen. Dazu müssen Sie den resultierenden Wert in die ursprüngliche Determinante einsetzen und sicherstellen, dass dies der Fall ist  , es erneut öffnen.
, es erneut öffnen.
Abschließend betrachten wir ein weiteres typisches Problem, das eher algebraischer Natur ist und traditionell in einem Kurs über lineare Algebra enthalten ist. Es kommt so häufig vor, dass es ein eigenes Thema verdient:
Beweisen Sie, dass 3 Vektoren die Grundlage des dreidimensionalen Raums bilden
und finden Sie die Koordinaten des 4. Vektors in dieser Basis
Beispiel 8
Es werden Vektoren angegeben. Zeigen Sie, dass Vektoren eine Basis im dreidimensionalen Raum bilden und ermitteln Sie die Koordinaten des Vektors in dieser Basis.
Lösung: Befassen wir uns zunächst mit der Erkrankung. Durch die Bedingung sind vier Vektoren gegeben, und wie Sie sehen können, haben sie in gewisser Weise bereits Koordinaten. Was diese Grundlage ist, interessiert uns nicht. Und folgendes ist von Interesse: Drei Vektoren können durchaus eine neue Basis bilden. Und die erste Stufe stimmt vollständig mit der Lösung von Beispiel 6 überein. Es muss überprüft werden, ob die Vektoren wirklich linear unabhängig sind:
Berechnen wir die Determinante aus Vektorkoordinaten: 
, was bedeutet, dass die Vektoren linear unabhängig sind und die Grundlage des dreidimensionalen Raums bilden.
! Wichtig : Vektorkoordinaten Notwendig aufschreiben in Spalten Determinante, nicht in Strings. Andernfalls kommt es zu Verwirrung im weiteren Lösungsalgorithmus.
Von uns vorgestellt lineare Operationen auf Vektoren ermöglichen die Erstellung verschiedener Ausdrücke für Vektorgrößen und transformieren Sie sie mithilfe der für diese Operationen festgelegten Eigenschaften.
Basierend auf einem gegebenen Satz von Vektoren a 1, ..., a n können Sie einen Ausdruck der Form erstellen
wobei a 1, ... und n beliebige reelle Zahlen sind. Dieser Ausdruck heißt lineare Kombination von Vektoren a 1, ..., a n. Die Zahlen α i, i = 1, n, repräsentieren Linearkombinationskoeffizienten. Man nennt auch eine Menge von Vektoren System von Vektoren.
Im Zusammenhang mit dem eingeführten Konzept einer Linearkombination von Vektoren stellt sich das Problem, eine Menge von Vektoren zu beschreiben, die als Linearkombination eines gegebenen Vektorsystems a 1, ..., a n geschrieben werden kann. Darüber hinaus stellen sich natürlich Fragen nach den Bedingungen, unter denen es eine Darstellung eines Vektors in Form einer Linearkombination gibt, und nach der Einzigartigkeit einer solchen Darstellung.
Definition 2.1. Es werden die Vektoren a 1, ... und n aufgerufen linear abhängig, wenn es einen Satz von Koeffizienten α 1 , ... , α n gibt, so dass
α 1 a 1 + ... + α n à n = 0 (2.2)
und mindestens einer dieser Koeffizienten ist ungleich Null. Wenn der angegebene Koeffizientensatz nicht existiert, werden die Vektoren aufgerufen linear unabhängig.
Wenn α 1 = ... = α n = 0, dann gilt offensichtlich α 1 a 1 + ... + α n a n = 0. Vor diesem Hintergrund können wir Folgendes sagen: Vektoren a 1, ... und n sind linear unabhängig, wenn aus Gleichung (2.2) folgt, dass alle Koeffizienten α 1 , ... , α n gleich Null sind.
Der folgende Satz erklärt, warum das neue Konzept den Begriff „Abhängigkeit“ (oder „Unabhängigkeit“) trägt, und liefert ein einfaches Kriterium für lineare Abhängigkeit.
Satz 2.1. Damit die Vektoren a 1, ... und n, n > 1 linear abhängig sind, ist es notwendig und ausreichend, dass einer von ihnen eine Linearkombination der anderen ist.
◄ Notwendigkeit. Nehmen wir an, dass die Vektoren a 1, ... und n linear abhängig sind. Gemäß Definition 2.1 der linearen Abhängigkeit gibt es in Gleichung (2.2) links mindestens einen Koeffizienten ungleich Null, zum Beispiel α 1. Wir lassen den ersten Term auf der linken Seite der Gleichheit und verschieben den Rest auf die rechte Seite, wobei wir wie üblich ihre Vorzeichen ändern. Wenn wir die resultierende Gleichheit durch α 1 dividieren, erhalten wir
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n /α 1 ⋅ a n
diese. Darstellung des Vektors a 1 als Linearkombination der übrigen Vektoren a 2, ..., a n.
Angemessenheit. Lassen Sie zum Beispiel den ersten Vektor a 1 als lineare Kombination der übrigen Vektoren darstellen: a 1 = β 2 a 2 + ... + β n a n. Wenn wir alle Terme von der rechten Seite nach links übertragen, erhalten wir a 1 - β 2 a 2 - ... - β n a n = 0, d.h. eine lineare Kombination von Vektoren a 1, ..., a n mit Koeffizienten α 1 = 1, α 2 = - β 2, ..., α n = - β n, gleich Nullvektor. In dieser Linearkombination sind nicht alle Koeffizienten Null. Nach Definition 2.1 sind die Vektoren a 1, ... und n linear abhängig.
Die Definition und das Kriterium der linearen Abhängigkeit werden so formuliert, dass sie das Vorhandensein von zwei oder mehr Vektoren implizieren. Wir können jedoch auch von einer linearen Abhängigkeit eines Vektors sprechen. Um diese Möglichkeit zu realisieren, müssen Sie statt „Vektoren sind linear abhängig“ sagen: „Das Vektorsystem ist linear abhängig.“ Es ist leicht zu erkennen, dass der Ausdruck „ein System aus einem Vektor ist linear abhängig“ bedeutet, dass dieser einzelne Vektor Null ist (in einer Linearkombination gibt es nur einen Koeffizienten und dieser sollte nicht gleich Null sein).
Das Konzept der linearen Abhängigkeit hat eine einfache geometrische Interpretation. Die folgenden drei Aussagen verdeutlichen diese Interpretation.
Satz 2.2. Zwei Vektoren sind genau dann linear abhängig, wenn sie kollinear.
◄ Wenn die Vektoren a und b linear abhängig sind, dann wird einer von ihnen, zum Beispiel a, durch den anderen ausgedrückt, d.h. a = λb für eine reelle Zahl λ. Gemäß Definition 1.7 funktioniert Vektoren pro Zahl, die Vektoren a und b sind kollinear.
Seien nun die Vektoren a und b kollinear. Wenn beide Null sind, ist es offensichtlich, dass sie linear abhängig sind, da jede lineare Kombination von ihnen gleich dem Nullvektor ist. Einer dieser Vektoren sei ungleich 0, zum Beispiel Vektor b. Bezeichnen wir mit λ das Verhältnis der Vektorlängen: λ = |a|/|b|. Kollineare Vektoren können sein unidirektional oder entgegengesetzt gerichtet. Im letzteren Fall ändern wir das Vorzeichen von λ. Wenn wir dann Definition 1.7 überprüfen, sind wir überzeugt, dass a = λb. Nach Satz 2.1 sind die Vektoren a und b linear abhängig.
Bemerkung 2.1. Im Fall zweier Vektoren lässt sich der bewährte Satz unter Berücksichtigung des Kriteriums der linearen Abhängigkeit wie folgt umformulieren: Zwei Vektoren sind genau dann kollinear, wenn einer von ihnen als Produkt des anderen durch eine Zahl dargestellt wird. Dies ist ein praktisches Kriterium für die Kollinearität zweier Vektoren.
Satz 2.3. Drei Vektoren sind genau dann linear abhängig, wenn sie koplanar.
◄ Wenn drei Vektoren a, b, c linear abhängig sind, dann ist nach Satz 2.1 einer von ihnen, zum Beispiel a, eine Linearkombination der anderen: a = βb + γс. Kombinieren wir die Ursprünge der Vektoren b und c am Punkt A. Dann haben die Vektoren βb, γс einen gemeinsamen Ursprung am Punkt A und entlang nach der Parallelogrammregel ihre Summe, diese. Vektor a wird ein Vektor mit Ursprung A und sein das Ende, der der Scheitelpunkt eines Parallelogramms ist, das aus Komponentenvektoren aufgebaut ist. Somit liegen alle Vektoren in derselben Ebene, also koplanar.
Die Vektoren a, b, c seien koplanar. Wenn einer dieser Vektoren Null ist, ist es offensichtlich, dass es sich um eine Linearkombination der anderen handelt. Es reicht aus, alle Koeffizienten einer Linearkombination gleich Null anzunehmen. Daher können wir davon ausgehen, dass alle drei Vektoren nicht Null sind. kompatibel gestartet dieser Vektoren an einem gemeinsamen Punkt O. Ihre Enden seien die Punkte A, B bzw. C (Abb. 2.1). Durch Punkt C zeichnen wir Linien parallel zu Linien, die durch Punktepaare O, A und O, B verlaufen. Wenn wir die Schnittpunkte als A" und B" bezeichnen, erhalten wir ein Parallelogramm OA"CB", also OC" = OA" + OB". Der Vektor OA" und der Nicht-Null-Vektor a = OA sind kollinear, und daher kann der erste von ihnen durch Multiplikation des zweiten mit einer reellen Zahl α:OA" = αOA erhalten werden. Ebenso gilt OB" = βOB, β ∈ R. Als Ergebnis erhalten wir OC" = α OA. + βOB, d. h. Vektor c ist eine Linearkombination der Vektoren a und b. Nach Satz 2.1 sind die Vektoren a, b, c linear abhängig.

Satz 2.4. Alle vier Vektoren sind linear abhängig.
◄ Wir führen den Beweis nach dem gleichen Schema wie in Satz 2.3 durch. Betrachten Sie beliebige vier Vektoren a, b, c und d. Wenn einer der vier Vektoren Null ist oder es zwei kollineare Vektoren unter ihnen gibt oder drei der vier Vektoren koplanar sind, dann sind diese vier Vektoren linear abhängig. Wenn beispielsweise die Vektoren a und b kollinear sind, können wir ihre Linearkombination αa + βb = 0 mit Koeffizienten ungleich Null erstellen und dann die verbleibenden zwei Vektoren zu dieser Kombination hinzufügen, wobei wir Nullen als Koeffizienten verwenden. Wir erhalten eine lineare Kombination von vier Vektoren gleich 0, in denen es Koeffizienten ungleich Null gibt.
Daher können wir davon ausgehen, dass unter den ausgewählten vier Vektoren kein Vektor Null ist, keine zwei kollinear sind und keine drei koplanar sind. Wählen wir Punkt O als gemeinsamen Anfang. Dann sind die Enden der Vektoren a, b, c, d einige Punkte A, B, C, D (Abb. 2.2). Durch Punkt D zeichnen wir drei Ebenen, parallel zu Ebenen OBC, OCA, OAB, und seien A“, B“, C“ die Schnittpunkte dieser Ebenen mit den Geraden OA, OB, OS. Wir erhalten das Parallelepiped OA“C“B“C“B“DA ", und die Vektoren a, b, c liegen auf seinen Kanten, die vom Scheitelpunkt O ausgehen. Da das Viereck OC"DC" ein Parallelogramm ist, gilt OD = OC" + OC" . Das Segment OC" wiederum ist eine Diagonale von das Parallelogramm OA"C"B", so dass OC" = OA" + OB" und OD = OA" + OB" + OC" .
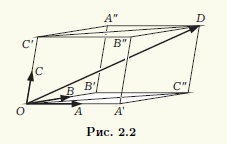
Es bleibt zu beachten, dass die Vektorpaare OA ≠ 0 und OA" , OB ≠ 0 und OB" , OC ≠ 0 und OC" kollinear sind und es daher möglich ist, die Koeffizienten α, β, γ so auszuwählen OA" = αOA , OB" = βOB und OC" = γOC. Wir erhalten schließlich OD = αOA + βOB + γOC. Folglich wird der OD-Vektor durch die anderen drei Vektoren ausgedrückt, und alle vier Vektoren sind gemäß Satz 2.1 linear abhängig.
Definition. Linearkombination von Vektoren a 1 , ..., a n mit den Koeffizienten x 1 , ..., x n wird als Vektor bezeichnet
x 1 ein 1 + ... + x n ein n .
trivial, wenn alle Koeffizienten x 1 , ..., x n gleich Null sind.
Definition. Die Linearkombination x 1 a 1 + ... + x n a n heißt nicht trivial, wenn mindestens einer der Koeffizienten x 1, ..., x n ungleich Null ist.
linear unabhängig, wenn es keine nichttriviale Kombination dieser Vektoren gibt, die gleich ist Nullvektor.
Das heißt, die Vektoren a 1, ..., a n sind linear unabhängig, wenn x 1 a 1 + ... + x n a n = 0 genau dann, wenn x 1 = 0, ..., x n = 0.
Definition. Die Vektoren a 1, ..., a n heißen linear abhängig, wenn es eine nicht triviale Kombination dieser Vektoren gibt, die gleich ist Nullvektor.
Eigenschaften linear abhängiger Vektoren:
Für n-dimensionale Vektoren.
n + 1 Vektoren sind immer linear abhängig.
Für 2- und dreidimensionale Vektoren.
Zwei linear abhängige Vektoren sind kollinear. (Kolineare Vektoren sind linear abhängig.)
Für dreidimensionale Vektoren.
Drei linear abhängige Vektoren sind koplanar. (Drei koplanare Vektoren sind linear abhängig.)
Beispiele für Probleme zur linearen Abhängigkeit und linearen Unabhängigkeit von Vektoren:
Beispiel 1. Überprüfen Sie, ob die Vektoren a = (3; 4; 5), b = (-3; 0; 5), c = (4; 4; 4), d = (3; 4; 0) linear unabhängig sind .
Lösung:
Die Vektoren sind linear abhängig, da die Dimension der Vektoren kleiner ist als die Anzahl der Vektoren.
Beispiel 2. Überprüfen Sie, ob die Vektoren a = (1; 1; 1), b = (1; 2; 0), c = (0; -1; 1) linear unabhängig sind.
Lösung:
| x 1 + x 2 = 0 | |
| x 1 + 2x 2 - x 3 = 0 | |
| x 1 + x 3 = 0 |
| 1 | 1 | 0 | 0 | ~ | ||
| 1 | 2 | -1 | 0 | |||
| 1 | 0 | 1 | 0 |
| ~ | 1 | 1 | 0 | 0 | ~ | 1 | 1 | 0 | 0 | ~ | ||||
| 1 - 1 | 2 - 1 | -1 - 0 | 0 - 0 | 0 | 1 | -1 | 0 | |||||||
| 1 - 1 | 0 - 1 | 1 - 0 | 0 - 0 | 0 | -1 | 1 | 0 |
subtrahiere die zweite von der ersten Zeile; Fügen Sie der dritten Zeile eine zweite Zeile hinzu:
| ~ | 1 - 0 | 1 - 1 | 0 - (-1) | 0 - 0 | ~ | 1 | 0 | 1 | 0 | ||||
| 0 | 1 | -1 | 0 | 0 | 1 | -1 | 0 | ||||||
| 0 + 0 | -1 + 1 | 1 + (-1) | 0 + 0 | 0 | 0 | 0 | 0 |
Diese Lösung zeigt, dass das System viele Lösungen hat, das heißt, es gibt eine Kombination von Werten der Zahlen x 1, x 2, x 3 ungleich Null, so dass die Linearkombination der Vektoren a, b, c gleich ist der Nullvektor, zum Beispiel:
A + b + c = 0
und das bedeutet, dass die Vektoren a, b, c linear abhängig sind.
Antwort: Vektoren a, b, c sind linear abhängig.
Beispiel 3. Überprüfen Sie, ob die Vektoren a = (1; 1; 1), b = (1; 2; 0), c = (0; -1; 2) linear unabhängig sind.
Lösung: Finden wir die Werte der Koeffizienten, bei denen die Linearkombination dieser Vektoren gleich dem Nullvektor ist.
x 1 a + x 2 b + x 3 c 1 = 0Diese Vektorgleichung kann als System geschrieben werden lineare Gleichungen
| x 1 + x 2 = 0 | |
| x 1 + 2x 2 - x 3 = 0 | |
| x 1 + 2x 3 = 0 |
Lösen wir dieses System mit der Gauß-Methode
| 1 | 1 | 0 | 0 | ~ | ||
| 1 | 2 | -1 | 0 | |||
| 1 | 0 | 2 | 0 |
subtrahiere die erste von der zweiten Zeile; subtrahiere die erste von der dritten Zeile:
| ~ | 1 | 1 | 0 | 0 | ~ | 1 | 1 | 0 | 0 | ~ | ||||
| 1 - 1 | 2 - 1 | -1 - 0 | 0 - 0 | 0 | 1 | -1 | 0 | |||||||
| 1 - 1 | 0 - 1 | 2 - 0 | 0 - 0 | 0 | -1 | 2 | 0 |
subtrahiere die zweite von der ersten Zeile; Fügen Sie der dritten Zeile eine Sekunde hinzu.
Das Vektorsystem heißt linear abhängig, wenn es Zahlen gibt, unter denen mindestens eine von Null verschieden ist, so dass die Gleichheit https://pandia.ru/text/78/624/images/image004_77.gif" width="57" height="24 src= " >.
Ist diese Gleichheit nur dann erfüllt, wenn alle , dann heißt das Vektorsystem linear unabhängig.
Satz. Das Vektorsystem wird linear abhängig genau dann, wenn mindestens einer seiner Vektoren eine Linearkombination der anderen ist.
Beispiel 1. Polynom ![]() ist eine lineare Kombination von Polynomen https://pandia.ru/text/78/624/images/image010_46.gif" width="88 height=24" height="24">. Die Polynome bilden seitdem ein linear unabhängiges System das Polynom https://pandia.ru/text/78/624/images/image012_44.gif" width="129" height="24">.
ist eine lineare Kombination von Polynomen https://pandia.ru/text/78/624/images/image010_46.gif" width="88 height=24" height="24">. Die Polynome bilden seitdem ein linear unabhängiges System das Polynom https://pandia.ru/text/78/624/images/image012_44.gif" width="129" height="24">.
Beispiel 2. Das Matrixsystem, https://pandia.ru/text/78/624/images/image016_37.gif" width="51" height="48 src="> ist linear unabhängig, da eine lineare Kombination gleich ist Nullmatrix nur in dem Fall, wenn https://pandia.ru/text/78/624/images/image019_27.gif" width="69" height="21">, , https://pandia.ru/text /78/624 /images/image022_26.gif" width="40" height="21"> linear abhängig.
Lösung.
Lassen Sie uns eine lineare Kombination dieser Vektoren erstellen https://pandia.ru/text/78/624/images/image023_29.gif" width="97" height="24">=0..gif" width="360" Höhe=" 22">.
Wenn wir die gleichen Koordinaten gleicher Vektoren gleichsetzen, erhalten wir https://pandia.ru/text/78/624/images/image027_24.gif" width="289" height="69">
Endlich bekommen wir
 Und
Und
Das System hat eine eindeutige triviale Lösung, daher ist eine Linearkombination dieser Vektoren nur dann gleich Null, wenn alle Koeffizienten gleich Null sind. Deshalb dieses System Vektoren ist linear unabhängig.
Beispiel 4. Die Vektoren sind linear unabhängig. Wie werden die Vektorsysteme aussehen?
A).![]() ;
;
B).![]() ?
?
Lösung.
A). Machen wir eine Linearkombination und setzen sie mit Null gleich
Unter Verwendung der Eigenschaften von Operationen mit Vektoren im linearen Raum schreiben wir die letzte Gleichheit in der Form um
Da die Vektoren linear unabhängig sind, müssen die Koeffizienten at gleich Null sein, d. h..gif" width="12" height="23 src=">
Das resultierende Gleichungssystem hat eine einzigartige triviale Lösung ![]() .
.
Da Gleichberechtigung (*) wird nur ausgeführt, wenn https://pandia.ru/text/78/624/images/image031_26.gif" width="115 height=20" height="20"> – linear unabhängig;
B). Machen wir eine Gleichheit https://pandia.ru/text/78/624/images/image039_17.gif" width="265" height="24 src="> (**)
Wenn wir eine ähnliche Argumentation anwenden, erhalten wir
Wenn wir das Gleichungssystem mit der Gauß-Methode lösen, erhalten wir
 oder
oder
Das letztere System verfügt über unendlich viele Lösungen https://pandia.ru/text/78/624/images/image044_14.gif" width="149" height="24 src=">. Somit gibt es eine nicht- Nullsatz von Koeffizienten, für den die Gleichheit gilt (**)
. Daher das Vektorsystem ![]() – linear abhängig.
– linear abhängig.
Beispiel 5 Ein Vektorsystem ist linear unabhängig und ein Vektorsystem ist linear abhängig..gif" width="80" height="24">.gif" width="149 height=24" height="24"> (***)
In Gleichheit (***) . Tatsächlich wäre das System bei , linear abhängig.
Aus der Beziehung (***)
wir bekommen ![]() oder
oder ![]() Bezeichnen wir
Bezeichnen wir ![]() .
.
Wir bekommen ![]()
Aufgaben zur selbstständigen Lösung (im Unterricht)
1. Ein System, das einen Nullvektor enthält, ist linear abhängig.
2. System bestehend aus einem Vektor A, ist genau dann linear abhängig, wenn, a=0.
3. Ein aus zwei Vektoren bestehendes System ist genau dann linear abhängig, wenn die Vektoren proportional sind (d. h. einer von ihnen wird aus dem anderen durch Multiplikation mit einer Zahl erhalten).
4. Wenn Sie einem linear abhängigen System einen Vektor hinzufügen, erhalten Sie ein linear abhängiges System.
5. Wenn ein Vektor aus einem linear unabhängigen System entfernt wird, ist das resultierende Vektorsystem linear unabhängig.
6. Wenn das System S linear unabhängig, wird aber bei Addition eines Vektors linear abhängig B, dann der Vektor B linear ausgedrückt durch Systemvektoren S.
C). Matrizensystem , , im Raum der Matrizen zweiter Ordnung.
10. Sei das Vektorsystem A,B,C Der Vektorraum ist linear unabhängig. Beweisen Sie die lineare Unabhängigkeit der folgenden Vektorsysteme:
A).a+bbc.
B).a+https://pandia.ru/text/78/624/images/image062_13.gif" width="15" height="19">– willkürliche Nummer
C).a+b, a+c, b+c.
11. Lassen A,B,C– drei Vektoren auf der Ebene, aus denen ein Dreieck gebildet werden kann. Werden diese Vektoren linear abhängig sein?
12. Es werden zwei Vektoren angegeben a1=(1, 2, 3, 4),a2=(0, 0, 0, 1). Finden Sie zwei weitere vierdimensionale Vektoren a3 unda4 damit das System a1,a2,a3,a4 war linear unabhängig .