Algebraische Eigenschaften des Vektorprodukts von Vektoren. Einheitsvektoren. Orty. Kartesisches Koordinatensystem
Einheitsvektor- Das Vektor, dessen Absolutwert (Modul) gleich Eins ist. Um einen Einheitsvektor zu bezeichnen, verwenden wir den Index e. Wenn also ein Vektor angegeben ist A, dann ist sein Einheitsvektor der Vektor A e. Dieser Einheitsvektor ist in die gleiche Richtung gerichtet wie der Vektor selbst A, und sein Modul ist gleich eins, also a e = 1.
Offensichtlich, A= a A e (a - Vektormodul A). Dies folgt aus der Regel, nach der die Operation der Multiplikation eines Skalars mit einem Vektor durchgeführt wird.
Einheitsvektoren oft mit den Koordinatenachsen eines Koordinatensystems verbunden (insbesondere mit den Achsen eines kartesischen Koordinatensystems). Die Anweisungen dazu Vektoren fallen mit den Richtungen der entsprechenden Achsen zusammen und ihre Ursprünge werden oft mit dem Ursprung des Koordinatensystems kombiniert.
Ich möchte Sie daran erinnern Kartesisches Koordinatensystem im Raum wird traditionell ein Trio von zueinander senkrechten Achsen genannt, die sich in einem Punkt schneiden, der als Koordinatenursprung bezeichnet wird. Koordinatenachsen werden üblicherweise mit den Buchstaben X, Y, Z bezeichnet und als Abszissenachse, Ordinatenachse bzw. Anwendungsachse bezeichnet. Descartes selbst verwendete nur eine Achse, auf der Abszissen aufgetragen waren. Nutzungsvorteil SystemeÄxte gehören seinen Schülern. Deshalb der Satz Kartesisches Koordinatensystem historisch falsch. Es ist besser zu reden rechteckig Koordinatensystem oder orthogonales Koordinatensystem. Wir werden jedoch die Traditionen nicht ändern und in Zukunft davon ausgehen, dass kartesische und rechtwinklige (orthogonale) Koordinatensysteme ein und dasselbe sind.
Einheitsvektor, entlang der X-Achse gerichtet, wird bezeichnet ich, Einheitsvektor, entlang der Y-Achse gerichtet, wird bezeichnet J, A Einheitsvektor, entlang der Z-Achse gerichtet, wird bezeichnet k. Vektoren ich, J, k werden genannt Orte(Abb. 12, links), sie bestehen also aus einzelnen Modulen
i = 1, j = 1, k = 1.
Äxte und Einheitsvektoren rechteckiges Koordinatensystem teilweise haben sie unterschiedliche Namen und Bezeichnungen. Somit kann die Abszissenachse X als Tangentenachse bezeichnet werden und ihr Einheitsvektor wird bezeichnet τ (griechischer Kleinbuchstabe Tau), die Ordinatenachse ist die Normalachse, ihr Ort wird bezeichnet N, die Applikatachse ist die binormale Achse, ihr Einheitsvektor wird bezeichnet B. Warum Namen ändern, wenn das Wesentliche gleich bleibt?
Tatsache ist, dass beispielsweise in der Mechanik bei der Untersuchung der Bewegung von Körpern sehr häufig das rechtwinklige Koordinatensystem verwendet wird. Wenn also das Koordinatensystem selbst stationär ist und die Änderung der Koordinaten eines sich bewegenden Objekts in diesem stationären System verfolgt wird, werden die Achsen normalerweise mit X, Y, Z usw. bezeichnet Einheitsvektoren jeweils ich, J, k.
Aber oft, wenn sich ein Objekt entlang einiger bewegt krummlinige Flugbahn(z. B. entlang eines Kreises) kann es bequemer sein, mechanische Prozesse in einem Koordinatensystem zu betrachten, das sich mit diesem Objekt bewegt. Für ein solches bewegtes Koordinatensystem werden andere Achsennamen und ihre Einheitsvektoren verwendet. Es ist einfach so. In diesem Fall ist die X-Achse tangential zur Flugbahn an dem Punkt gerichtet, an dem sie sich befindet dieser Moment Dieses Objekt befindet sich. Und dann heißt diese Achse nicht mehr X-Achse, sondern Tangentenachse, und ihr Einheitsvektor wird nicht mehr bezeichnet ich, A τ . Die Y-Achse ist entlang des Krümmungsradius der Flugbahn gerichtet (bei Bewegung im Kreis - zum Mittelpunkt des Kreises). Und da der Radius senkrecht zur Tangente steht, wird die Achse Normalenachse genannt (senkrecht und normal sind dasselbe). Der Einheitsvektor dieser Achse wird nicht mehr bezeichnet J, A N. Die dritte Achse (früher Z) verläuft senkrecht zu den beiden vorherigen. Dies ist ein Binormal mit einem Orth B(Abb. 12, rechts). Übrigens, in diesem Fall z rechteckiges Koordinatensystem oft als „natürlich“ oder natürlich bezeichnet.
Endlich habe ich dieses umfangreiche und lang erwartete Thema in die Hände bekommen. analytische Geometrie. Zunächst ein wenig zu diesem Abschnitt der höheren Mathematik ... Sicherlich erinnern Sie sich jetzt an einen Schulgeometriekurs mit zahlreichen Theoremen, deren Beweisen, Zeichnungen usw. Was man verbergen sollte, ist für einen erheblichen Teil der Studierenden ein ungeliebtes und oft unklares Thema. Seltsamerweise scheint die analytische Geometrie interessanter und zugänglicher zu sein. Was bedeutet das Adjektiv „analytisch“? Mir fallen sofort zwei klischeehafte mathematische Ausdrücke ein: „grafische Lösungsmethode“ und „analytische Lösungsmethode“. Grafische Methode, ist natürlich mit der Erstellung von Grafiken und Zeichnungen verbunden. Analytisch Dasselbe Methode beinhaltet das Lösen von Problemen hauptsächlich durch algebraische Operationen. In dieser Hinsicht ist der Algorithmus zur Lösung fast aller Probleme der analytischen Geometrie einfach und transparent; oft reicht es aus, die notwendigen Formeln sorgfältig anzuwenden – und die Antwort ist fertig! Nein, natürlich geht es ohne Zeichnungen überhaupt nicht und außerdem für besseres Verstehen Ich werde versuchen, mehr Material als nötig bereitzustellen.
Der neu eröffnete Geometrieunterricht erhebt keinen Anspruch auf theoretische Vollständigkeit, sondern ist auf die Lösung praktischer Probleme ausgerichtet. Ich werde in meinen Vorträgen nur das einbringen, was aus meiner Sicht wichtig ist in der Praxis. Wenn Sie umfassendere Hilfe zu einem Unterabschnitt benötigen, empfehle ich die folgende leicht zugängliche Literatur:
1) Eine Sache, mit der, kein Scherz, mehrere Generationen vertraut sind: Schulbuch zur Geometrie, Autoren - L.S. Atanasyan und Company. Dieser Kleiderbügel für die Schulumkleidekabine wurde bereits 20 (!) nachgedruckt, was natürlich nicht die Grenze darstellt.
2) Geometrie in 2 Bänden. Autoren L.S. Atanasyan, Bazylev V.T.. Das ist Literatur für die Oberstufe, die Sie brauchen werden erster Band. Selten angetroffene Aufgaben fallen mir möglicherweise aus den Augen Lernprogramm wird unschätzbare Hilfe leisten.
Beide Bücher können kostenlos online heruntergeladen werden. Darüber hinaus können Sie mein Archiv mit vorgefertigten Lösungen nutzen, die Sie auf der Seite finden Laden Sie Beispiele in höherer Mathematik herunter.
Unter den Tools schlage ich wieder meine eigene Entwicklung vor - Softwarepaket in der analytischen Geometrie, was das Leben erheblich vereinfacht und viel Zeit spart.
Es wird davon ausgegangen, dass der Leser mit grundlegenden geometrischen Konzepten und Figuren vertraut ist: Punkt, Linie, Ebene, Dreieck, Parallelogramm, Parallelepiped, Würfel usw. Es ist ratsam, sich an einige Theoreme zu erinnern, zumindest an den Satz des Pythagoras, hallo an Wiederholer)
Und nun betrachten wir nacheinander: das Konzept eines Vektors, Aktionen mit Vektoren, Vektorkoordinaten. Ich empfehle weiterzulesen der wichtigste Artikel Skalarprodukt von Vektoren, und auch Vektor und gemischtes Produkt von Vektoren. Auch eine lokale Aufgabe – die Aufteilung eines Segments in diesem Sinne – wird nicht überflüssig sein. Basierend auf den oben genannten Informationen können Sie es meistern Gleichung einer Geraden in einer Ebene Mit einfachste Lösungsbeispiele, was es ermöglichen wird lernen, Geometrieprobleme zu lösen. Die folgenden Artikel sind ebenfalls nützlich: Gleichung einer Ebene im Raum, Gleichungen einer Linie im Raum, Grundprobleme einer Geraden und einer Ebene, weitere Abschnitte der analytischen Geometrie. Selbstverständlich werden dabei auch Standardaufgaben berücksichtigt.
Vektorkonzept. Kostenloser Vektor
Wiederholen wir zunächst die Schuldefinition eines Vektors. Vektor angerufen gerichtet ein Segment, dessen Anfang und Ende angegeben sind:
IN in diesem Fall Der Anfang des Segments ist der Punkt, das Ende des Segments ist der Punkt. Der Vektor selbst wird mit bezeichnet. Richtung ist wichtig, wenn man den Pfeil an das andere Ende des Segments bewegt, erhält man einen Vektor, und dieser ist bereits vorhanden völlig anderer Vektor. Es ist praktisch, das Konzept eines Vektors mit der Bewegung eines physischen Körpers gleichzusetzen: Sie müssen zustimmen, dass das Betreten der Türen eines Instituts oder das Verlassen der Türen eines Instituts völlig verschiedene Dinge sind.
Es ist zweckmäßig, einzelne Punkte einer Ebene oder eines Raums als sogenannte Punkte zu betrachten Nullvektor. Bei einem solchen Vektor fallen Ende und Anfang zusammen.
!!! Notiz: Hier und weiter können Sie davon ausgehen, dass die Vektoren in derselben Ebene liegen, oder Sie können davon ausgehen, dass sie sich im Raum befinden – die Essenz des präsentierten Materials gilt sowohl für die Ebene als auch für den Raum.
Bezeichnungen: Vielen fiel sofort der Stock ohne Pfeil in der Bezeichnung auf und meinten, oben ist ja auch ein Pfeil! Man kann es zwar mit einem Pfeil schreiben: , aber es ist auch möglich der Eintrag, den ich in Zukunft verwenden werde. Warum? Anscheinend hat sich diese Angewohnheit aus praktischen Gründen entwickelt; meine Schützen in der Schule und an der Universität erwiesen sich als zu unterschiedlich groß und zottelig. In der Bildungsliteratur gibt man sich manchmal überhaupt nicht mit der Keilschrift auseinander, sondern hebt die Buchstaben fett hervor: und deutet damit an, dass es sich um einen Vektor handelt.
Das war Stilistik, und nun geht es um die Möglichkeiten, Vektoren zu schreiben:
1) Vektoren können in zwei lateinischen Großbuchstaben geschrieben werden: ![]() usw. In diesem Fall der erste Buchstabe Notwendig bezeichnet den Anfangspunkt des Vektors und der zweite Buchstabe bezeichnet den Endpunkt des Vektors.
usw. In diesem Fall der erste Buchstabe Notwendig bezeichnet den Anfangspunkt des Vektors und der zweite Buchstabe bezeichnet den Endpunkt des Vektors.
2) Vektoren werden auch in kleinen lateinischen Buchstaben geschrieben:
Insbesondere kann unser Vektor der Kürze halber durch einen kleinen lateinischen Buchstaben umbenannt werden.
Länge oder Modul Ein Vektor ungleich Null wird als Länge des Segments bezeichnet. Die Länge des Nullvektors ist Null. Logisch.
Die Länge des Vektors wird durch das Modulzeichen angegeben: ,
Wir werden etwas später lernen, wie man die Länge eines Vektors ermittelt (oder wir werden es wiederholen, je nachdem, wer).
Dies waren grundlegende Informationen über Vektoren, die allen Schulkindern bekannt waren. In der analytischen Geometrie ist das sogenannte kostenloser Vektor.
Einfach gesagt - Der Vektor kann von jedem Punkt aus aufgezeichnet werden:
Wir sind es gewohnt, solche Vektoren gleich zu nennen (die Definition gleicher Vektoren wird weiter unten gegeben), aber aus rein mathematischer Sicht sind sie der GLEICHE VEKTOR oder kostenloser Vektor. Warum kostenlos? Denn im Zuge der Lösung von Problemen können Sie diesen oder jenen Vektor an JEDEM Punkt der Ebene oder des Raums „anhängen“, den Sie benötigen. Das ist eine sehr coole Funktion! Stellen Sie sich einen Vektor beliebiger Länge und Richtung vor – er kann unendlich oft und an jedem Punkt im Raum „geklont“ werden, tatsächlich existiert er ÜBERALL. Es gibt so einen Studentenspruch: Der Vektor ist jedem Dozenten scheißegal. Schließlich ist es nicht nur ein witziger Reim, alles ist mathematisch korrekt – der Vektor kann auch dort angehängt werden. Aber beeilen Sie sich nicht, sich zu freuen, es sind oft die Schüler selbst, die darunter leiden =)
Also, kostenloser Vektor- Das ein Haufen identische gerichtete Segmente. Die am Anfang des Absatzes angegebene Schuldefinition eines Vektors: „Ein gerichtetes Segment wird als Vektor bezeichnet ...“ impliziert Spezifisch ein gerichtetes Segment aus einer gegebenen Menge, das an einen bestimmten Punkt in der Ebene oder im Raum gebunden ist.
Es ist zu beachten, dass aus physikalischer Sicht das Konzept eines freien Vektors im Allgemeinen falsch ist und der Anwendungspunkt des Vektors von Bedeutung ist. Tatsächlich hat ein direkter Schlag mit der gleichen Kraft auf die Nase oder die Stirn, der ausreicht, um mein dummes Beispiel zu entwickeln, unterschiedliche Konsequenzen. Jedoch, unfrei Vektoren finden sich auch im Verlauf von Vyshmat (gehen Sie nicht dorthin :)).
Aktionen mit Vektoren. Kollinearität von Vektoren
Ein Schulgeometriekurs behandelt eine Reihe von Aktionen und Regeln mit Vektoren: Addition nach der Dreiecksregel, Addition nach der Parallelogrammregel, Vektordifferenzregel, Multiplikation eines Vektors mit einer Zahl, Skalarprodukt von Vektoren usw. Als Ausgangspunkt wiederholen wir zwei Regeln, die für die Lösung von Problemen der analytischen Geometrie besonders relevant sind.
Die Regel zum Addieren von Vektoren mithilfe der Dreiecksregel
Betrachten Sie zwei beliebige Nicht-Null-Vektoren und: 
Sie müssen die Summe dieser Vektoren ermitteln. Da alle Vektoren als frei gelten, lassen wir den Vektor von beiseite Ende Vektor: 
Die Summe der Vektoren ist der Vektor. Für ein besseres Verständnis der Regel empfiehlt sich die Angabe physikalische Bedeutung: Lassen Sie einen Körper entlang eines Vektors wandern und dann entlang eines Vektors. Dann ist die Summe der Vektoren der Vektor des resultierenden Pfades mit dem Anfang am Ausgangspunkt und dem Ende am Ankunftspunkt. Eine ähnliche Regel wird für die Summe beliebig vieler Vektoren formuliert. Wie man so schön sagt, kann der Körper sehr geneigt im Zickzack oder vielleicht auf Autopilot entlang des resultierenden Vektors der Summe seinen Weg gehen.
Übrigens, wenn der Vektor verschoben wird gestartet Vektor, dann erhalten wir das Äquivalent Parallelogrammregel Addition von Vektoren.
Zunächst zur Kollinearität von Vektoren. Die beiden Vektoren werden aufgerufen kollinear, wenn sie auf derselben Geraden oder auf parallelen Geraden liegen. Grob gesagt sprechen wir von parallelen Vektoren. Aber in Bezug auf sie wird immer das Adjektiv „kollinear“ verwendet.
Stellen Sie sich zwei kollineare Vektoren vor. Wenn die Pfeile dieser Vektoren in die gleiche Richtung zeigen, werden solche Vektoren aufgerufen Co-Regie. Wenn die Pfeile in unterschiedliche Richtungen zeigen, sind die Vektoren gleich entgegengesetzte Richtungen.
Bezeichnungen: Kollinearität von Vektoren wird mit dem üblichen Parallelitätssymbol geschrieben: , wobei eine Detaillierung möglich ist: (Vektoren sind gleichgerichtet) oder (Vektoren sind entgegengesetzt gerichtet).
Die Arbeit Ein Nicht-Null-Vektor auf einer Zahl ist ein Vektor, dessen Länge gleich ist, und die Vektoren und sind gemeinsam auf und entgegengesetzt gerichtet.
Die Regel zum Multiplizieren eines Vektors mit einer Zahl lässt sich anhand eines Bildes leichter verstehen: 
Schauen wir es uns genauer an:
1 Richtung. Wenn der Multiplikator negativ ist, dann der Vektor ändert die Richtung zum Gegenteil.
2) Länge. Wenn der Multiplikator in oder enthalten ist, dann die Länge des Vektors nimmt ab. Somit ist die Länge des Vektors halb so lang wie der Vektor. Wenn der Modul des Multiplikators größer als eins ist, dann ist die Länge des Vektors erhöht sich rechtzeitig.
3) Bitte beachten Sie das alle Vektoren sind kollinear, während ein Vektor durch einen anderen ausgedrückt wird, zum Beispiel . Das Gegenteil ist auch der Fall: Wenn ein Vektor durch einen anderen ausgedrückt werden kann, dann sind solche Vektoren notwendigerweise kollinear. Auf diese Weise: Wenn wir einen Vektor mit einer Zahl multiplizieren, erhalten wir eine Kollinearität(relativ zum Original) Vektor.
4) Die Vektoren sind gleichgerichtet. Vektoren und werden ebenfalls mitgesteuert. Jeder Vektor der ersten Gruppe ist in Bezug auf jeden Vektor der zweiten Gruppe entgegengesetzt gerichtet.
Welche Vektoren sind gleich?
Zwei Vektoren sind gleich, wenn sie in die gleiche Richtung weisen und die gleiche Länge haben. Beachten Sie, dass Kodirektionalität Kollinearität von Vektoren impliziert. Die Definition wäre ungenau (redundant), wenn wir sagen würden: „Zwei Vektoren sind gleich, wenn sie kollinear und gleichgerichtet sind und die gleiche Länge haben.“
Aus der Sicht des Konzepts eines freien Vektors sind gleiche Vektoren dieselben Vektoren, wie im vorherigen Absatz erläutert.
Vektorkoordinaten in der Ebene und im Raum
Der erste Punkt besteht darin, Vektoren in der Ebene zu betrachten. Lassen Sie uns ein kartesisches rechtwinkliges Koordinatensystem darstellen und es ausgehend vom Koordinatenursprung zeichnen einzel Vektoren und :

Vektoren und senkrecht. Orthogonal = Senkrecht. Ich empfehle Ihnen, sich langsam an die Begriffe zu gewöhnen: Anstelle von Parallelität und Rechtwinkligkeit verwenden wir die Wörter entsprechend Kollinearität Und Orthogonalität.
Bezeichnung: Die Orthogonalität von Vektoren wird mit dem üblichen Rechtwinkligkeitssymbol geschrieben, zum Beispiel: .
Die betrachteten Vektoren werden aufgerufen Koordinatenvektoren oder Orte. Diese Vektoren bilden sich Basis auf der Oberfläche. Was eine Basis ist, ist meiner Meinung nach für viele intuitiv klar; genauere Informationen finden sich im Artikel Lineare (Nicht-)Abhängigkeit von Vektoren. Basis von Vektoren In einfachen Worten definieren die Basis und der Ursprung der Koordinaten das gesamte System – dies ist eine Art Fundament, auf dem ein volles und reiches geometrisches Leben brodelt.
Manchmal wird die konstruierte Basis aufgerufen orthonormal Basis der Ebene: „ortho“ – da die Koordinatenvektoren orthogonal sind, bedeutet das Adjektiv „normalisiert“ Einheit, d. h. die Längen der Basisvektoren sind gleich eins.
Bezeichnung: Die Basis wird normalerweise in Klammern geschrieben, in denen in strenger Reihenfolge Basisvektoren werden aufgelistet, zum Beispiel: . Koordinatenvektoren es ist verboten neu anordnen.
Beliebig Ebenenvektor der einzige Weg ausgedrückt als: ![]() , Wo - Zahlen die aufgerufen werden Vektorkoordinaten auf dieser Grundlage. Und der Ausdruck selbst
, Wo - Zahlen die aufgerufen werden Vektorkoordinaten auf dieser Grundlage. Und der Ausdruck selbst ![]() angerufen Vektorzerlegungnach Basis .
angerufen Vektorzerlegungnach Basis .
Abendessen serviert:

Beginnen wir mit dem ersten Buchstaben des Alphabets: . Die Zeichnung zeigt deutlich, dass bei der Zerlegung eines Vektors in eine Basis die gerade besprochenen verwendet werden:
1) die Regel zum Multiplizieren eines Vektors mit einer Zahl: und ;
2) Addition von Vektoren nach der Dreiecksregel: .
Zeichnen Sie nun im Geiste den Vektor von einem beliebigen anderen Punkt auf der Ebene aus. Es sei völlig offensichtlich, dass sein Verfall ihn „unerbittlich verfolgen“ werde. Hier ist sie, die Freiheit des Vektors – der Vektor „trägt alles mit sich“. Diese Eigenschaft gilt natürlich für jeden Vektor. Es ist lustig, dass die (freien) Basisvektoren selbst nicht vom Ursprung aus gezeichnet werden müssen; einer kann beispielsweise unten links und der andere oben rechts gezeichnet werden, und es ändert sich nichts! Das müssen Sie zwar nicht tun, da der Lehrer auch Originalität zeigt und Ihnen an einer unerwarteten Stelle einen „Credit“ auszahlt.
Vektoren veranschaulichen genau die Regel für die Multiplikation eines Vektors mit einer Zahl: Der Vektor ist mit dem Basisvektor gleichgerichtet, der Vektor ist dem Basisvektor entgegengesetzt gerichtet. Für diese Vektoren ist eine der Koordinaten gleich Null; Sie können es genau so schreiben:
Und die Basisvektoren sind übrigens so: (tatsächlich werden sie durch sich selbst ausgedrückt).
Und endlich: , . Was ist übrigens eine Vektorsubtraktion und warum habe ich nicht über die Subtraktionsregel gesprochen? Irgendwo in der linearen Algebra, ich weiß nicht mehr, wo, habe ich festgestellt, dass die Subtraktion ein Sonderfall der Addition ist. Somit lassen sich die Entwicklungen der Vektoren „de“ und „e“ leicht als Summe schreiben: , ![]() . Ordnen Sie die Begriffe neu an und sehen Sie in der Zeichnung, wie gut die gute alte Addition von Vektoren nach der Dreiecksregel in diesen Situationen funktioniert.
. Ordnen Sie die Begriffe neu an und sehen Sie in der Zeichnung, wie gut die gute alte Addition von Vektoren nach der Dreiecksregel in diesen Situationen funktioniert.
Die betrachtete Zerlegung des Formulars ![]() manchmal auch Vektorzerlegung genannt im Ortssystem(d. h. in einem System von Einheitsvektoren). Dies ist jedoch nicht die einzige Möglichkeit, einen Vektor zu schreiben. Die folgende Option ist üblich:
manchmal auch Vektorzerlegung genannt im Ortssystem(d. h. in einem System von Einheitsvektoren). Dies ist jedoch nicht die einzige Möglichkeit, einen Vektor zu schreiben. Die folgende Option ist üblich:
Oder mit einem Gleichheitszeichen:
Die Basisvektoren selbst werden wie folgt geschrieben: und
Das heißt, die Koordinaten des Vektors werden in Klammern angegeben. Bei praktischen Problemen werden alle drei Notationsmöglichkeiten verwendet.
Ich habe gezweifelt, ob ich etwas sagen soll, aber ich sage es trotzdem: Vektorkoordinaten können nicht neu angeordnet werden. Streng an erster Stelle wir schreiben die Koordinate auf, die dem Einheitsvektor entspricht, streng an zweiter Stelle Wir notieren die Koordinate, die dem Einheitsvektor entspricht. Tatsächlich sind und zwei verschiedene Vektoren.
Wir haben die Koordinaten im Flugzeug herausgefunden. Schauen wir uns nun Vektoren im dreidimensionalen Raum an, hier ist fast alles gleich! Es wird lediglich eine weitere Koordinate hinzugefügt. Es ist schwierig, dreidimensionale Zeichnungen zu erstellen, deshalb beschränke ich mich auf einen Vektor, den ich der Einfachheit halber vom Ursprung beiseite lege: 
Beliebig 3D-Raumvektor der einzige Wegüber eine orthonormale Basis erweitern: ![]() , wo sind die Koordinaten des Vektors (Zahl) in dieser Basis.
, wo sind die Koordinaten des Vektors (Zahl) in dieser Basis.
Beispiel aus dem Bild: ![]() . Sehen wir uns hier an, wie die Vektorregeln funktionieren. Zuerst wird der Vektor mit einer Zahl multipliziert: (roter Pfeil), (grüner Pfeil) und (himbeerfarbener Pfeil). Zweitens ist hier ein Beispiel für das Hinzufügen mehrerer Fall von drei, Vektoren: . Der Summenvektor beginnt am anfänglichen Ausgangspunkt (Anfang des Vektors) und endet am endgültigen Ankunftspunkt (Ende des Vektors).
. Sehen wir uns hier an, wie die Vektorregeln funktionieren. Zuerst wird der Vektor mit einer Zahl multipliziert: (roter Pfeil), (grüner Pfeil) und (himbeerfarbener Pfeil). Zweitens ist hier ein Beispiel für das Hinzufügen mehrerer Fall von drei, Vektoren: . Der Summenvektor beginnt am anfänglichen Ausgangspunkt (Anfang des Vektors) und endet am endgültigen Ankunftspunkt (Ende des Vektors).
Alle Vektoren des dreidimensionalen Raums sind natürlich auch frei; versuchen Sie, den Vektor gedanklich von jedem anderen Punkt zu entfernen, und Sie werden verstehen, dass seine Zerlegung „bei ihm bleiben wird“.
Ähnlich wie bei der flachen Hülle, zusätzlich zum Schreiben ![]() Weit verbreitet sind Versionen mit Klammern: entweder .
Weit verbreitet sind Versionen mit Klammern: entweder .
Fehlen in der Erweiterung ein (oder zwei) Koordinatenvektoren, werden an ihrer Stelle Nullen eingefügt. Beispiele:
Vektor (akribisch ![]() ) - Lass uns schreiben ;
) - Lass uns schreiben ;
Vektor (akribisch ![]() ) - Lass uns schreiben ;
) - Lass uns schreiben ;
Vektor (akribisch ![]() ) - Lass uns schreiben .
) - Lass uns schreiben .
Die Basisvektoren werden wie folgt geschrieben:
Dies ist vielleicht das gesamte theoretische Mindestwissen, das zur Lösung von Problemen der analytischen Geometrie erforderlich ist. Da es möglicherweise viele Begriffe und Definitionen gibt, empfehle ich Dummies, sie noch einmal zu lesen und zu verstehen diese Information noch einmal. Und es wird für jeden Leser nützlich sein, von Zeit zu Zeit auf die Grundlektion zurückzugreifen, um den Stoff besser zu verarbeiten. Kollinearität, Orthogonalität, Orthonormalbasis, Vektorzerlegung – diese und andere Konzepte werden in Zukunft häufig verwendet. Ich möchte darauf hinweisen, dass die Materialien der Website nicht ausreichen, um eine theoretische Prüfung oder ein Kolloquium in Geometrie zu bestehen, da ich alle Theoreme sorgfältig (und ohne Beweise) verschlüssele – zum Nachteil von wissenschaftlicher Stil Präsentation, aber ein Plus für Ihr Verständnis des Themas. Um detaillierte theoretische Informationen zu erhalten, wenden Sie sich bitte an Professor Atanasyan.
Und wir kommen zum praktischen Teil:
Die einfachsten Probleme der analytischen Geometrie.
Aktionen mit Vektoren in Koordinaten
Es ist sehr empfehlenswert zu lernen, wie man die zu berücksichtigenden Aufgaben und Formeln vollautomatisch löst sich einprägen, Sie müssen sich nicht einmal absichtlich daran erinnern, sie werden sich selbst daran erinnern =) Dies ist sehr wichtig, da andere Probleme der analytischen Geometrie auf den einfachsten Elementarbeispielen basieren und es ärgerlich sein wird, zusätzliche Zeit damit zu verbringen, Bauern zu essen . Es ist nicht nötig, die oberen Knöpfe Ihres Hemdes zu schließen; viele Dinge sind Ihnen aus der Schule bekannt.
Die Präsentation des Materials erfolgt parallel – sowohl für die Ebene als auch für den Weltraum. Aus dem Grund, dass alle Formeln... Sie werden es selbst sehen.
Wie finde ich einen Vektor aus zwei Punkten?
Sind zwei Punkte der Ebene und gegeben, so hat der Vektor folgende Koordinaten: ![]()
Sind zwei Punkte im Raum und gegeben, so hat der Vektor folgende Koordinaten:
Also, aus den Koordinaten des Endes des Vektors Sie müssen die entsprechenden Koordinaten subtrahieren Anfang des Vektors.
Übung: Schreiben Sie für dieselben Punkte die Formeln zum Ermitteln der Koordinaten des Vektors auf. Formeln am Ende der Lektion.
Beispiel 1
Gegeben sind zwei Punkte der Ebene und . Finden Sie Vektorkoordinaten
Lösung: nach der entsprechenden Formel:
Alternativ könnte auch folgender Eintrag verwendet werden:
Ästheten werden dies entscheiden:
Persönlich bin ich an die erste Version der Aufnahme gewöhnt.
Antwort:
Gemäß der Bedingung war es nicht notwendig, eine Zeichnung zu erstellen (was typisch für Probleme der analytischen Geometrie ist), aber um einige Punkte für Dummies zu klären, werde ich nicht faul sein: 
Du musst es auf jeden Fall verstehen Unterschied zwischen Punktkoordinaten und Vektorkoordinaten:
Punktkoordinaten sind die üblichen Koordinaten in rechteckiges System Koordinaten Ich denke, dass jeder von der 5. bis 6. Klasse weiß, wie man Punkte auf einer Koordinatenebene darstellt. Jeder Punkt hat einen festen Platz auf der Ebene und kann nirgendwo verschoben werden.
Die Koordinaten des Vektors– das ist in diesem Fall seine Erweiterung entsprechend der Basis. Jeder Vektor ist frei, sodass wir ihn bei Bedarf leicht von einem anderen Punkt in der Ebene weg verschieben können. Interessant ist, dass man für Vektoren überhaupt keine Achsen oder ein rechtwinkliges Koordinatensystem erstellen muss, sondern nur eine Basis, in diesem Fall eine Orthonormalbasis der Ebene.
Die Aufzeichnungen der Koordinaten von Punkten und Koordinaten von Vektoren scheinen ähnlich zu sein: , und Bedeutung von Koordinaten absolut anders, und Sie sollten sich dieses Unterschieds bewusst sein. Dieser Unterschied Das gilt natürlich auch für den Weltraum.
Meine Damen und Herren, füllen wir unsere Hände:
Beispiel 2
a) Punkte und werden vergeben. Finden Sie Vektoren und .
b) Es werden Punkte vergeben ![]() Und . Finden Sie Vektoren und .
Und . Finden Sie Vektoren und .
c) Punkte und werden vergeben. Finden Sie Vektoren und .
d) Es werden Punkte vergeben. Finden Sie Vektoren ![]() .
.
Vielleicht reicht das. Dies sind Beispiele, über die Sie selbst entscheiden können. Versuchen Sie, sie nicht zu vernachlässigen, es wird sich auszahlen ;-). Es ist nicht erforderlich, Zeichnungen anzufertigen. Lösungen und Antworten am Ende der Lektion.
Was ist bei der Lösung analytischer Geometrieprobleme wichtig? Es ist wichtig, ÄUSSERST VORSICHTIG zu sein, um den meisterhaften Fehler „Zwei plus zwei ist gleich Null“ zu vermeiden. Ich entschuldige mich sofort, wenn ich irgendwo einen Fehler gemacht habe =)
Wie finde ich die Länge eines Segments?
Die Länge wird, wie bereits erwähnt, durch das Modulzeichen angegeben.
Sind zwei Punkte der Ebene gegeben und , dann kann die Länge des Segments mit der Formel berechnet werden
Sind zwei Punkte im Raum und gegeben, so kann die Länge des Segments mit der Formel berechnet werden
Notiz: Die Formeln bleiben korrekt, wenn die entsprechenden Koordinaten vertauscht werden: und , aber die erste Option ist standardmäßiger
Beispiel 3
Lösung: nach der entsprechenden Formel:
Antwort: ![]()
Zur Verdeutlichung werde ich eine Zeichnung anfertigen 
Liniensegment - das ist kein Vektor, und natürlich können Sie es nicht irgendwohin verschieben. Zusätzlich, wenn Sie maßstabsgetreu zeichnen: 1 Einheit. = 1 cm (zwei Notizbuchzellen), dann kann die resultierende Antwort mit einem normalen Lineal überprüft werden, indem die Länge des Segments direkt gemessen wird.
Ja, die Lösung ist kurz, aber es sind noch ein paar mehr drin wichtige Punkte das möchte ich klarstellen:
Zunächst geben wir in der Antwort die Dimension „Einheiten“ ein. Der Zustand sagt nicht, WAS es ist, Millimeter, Zentimeter, Meter oder Kilometer. Daher wäre eine mathematisch korrekte Lösung die allgemeine Formulierung: „Einheiten“ – abgekürzt als „Einheiten“.
Zweitens wiederholen wir den Schulstoff, der nicht nur für die betrachtete Aufgabe nützlich ist:
beachten wichtige Technik – Entfernen des Multiplikators unter der Wurzel. Als Ergebnis der Berechnungen haben wir ein Ergebnis und ein guter mathematischer Stil besteht darin, den Faktor unter der Wurzel zu entfernen (wenn möglich). Im Detail sieht der Prozess so aus: ![]() . Natürlich wäre es kein Fehler, die Antwort so zu belassen, aber es wäre auf jeden Fall ein Manko und ein gewichtiges Argument für Streitereien seitens des Lehrers.
. Natürlich wäre es kein Fehler, die Antwort so zu belassen, aber es wäre auf jeden Fall ein Manko und ein gewichtiges Argument für Streitereien seitens des Lehrers.
Hier sind weitere häufige Fälle: 
Oft reicht es an der Wurzel große Nummer, Zum Beispiel . Was ist in solchen Fällen zu tun? Mit dem Taschenrechner prüfen wir, ob die Zahl durch 4 teilbar ist: . Ja, es war völlig geteilt, also: ![]() . Oder lässt sich die Zahl vielleicht noch einmal durch 4 teilen? . Auf diese Weise:
. Oder lässt sich die Zahl vielleicht noch einmal durch 4 teilen? . Auf diese Weise: ![]() . Die letzte Ziffer der Zahl ist ungerade, daher wird eine dritte Division durch 4 offensichtlich nicht funktionieren. Versuchen wir, durch neun zu dividieren: . Ergebend:
. Die letzte Ziffer der Zahl ist ungerade, daher wird eine dritte Division durch 4 offensichtlich nicht funktionieren. Versuchen wir, durch neun zu dividieren: . Ergebend:
Bereit.
Abschluss: wenn wir unter der Wurzel eine Zahl bekommen, die sich nicht als Ganzes extrahieren lässt, dann versuchen wir, den Faktor unter der Wurzel zu entfernen – mit einem Taschenrechner prüfen wir, ob die Zahl teilbar ist durch: 4, 9, 16, 25, 36, 49 usw.
Bei der Lösung verschiedener Probleme stößt man oft auf Wurzeln. Versuchen Sie immer, Faktoren unter der Wurzel zu extrahieren, um eine schlechtere Note und unnötige Probleme bei der Fertigstellung Ihrer Lösungen auf der Grundlage der Kommentare des Lehrers zu vermeiden.
Wiederholen wir auch das Quadrat der Wurzeln und anderer Potenzen: 
Regeln für Operationen mit Abschlüssen in allgemeiner Form finden Sie in Schulbuch in der Algebra, aber ich denke, anhand der gegebenen Beispiele ist bereits alles oder fast alles klar.
Aufgabe zur eigenständigen Lösung mit einem Segment im Raum:
Beispiel 4
Punkte und werden vergeben. Finden Sie die Länge des Segments.
Die Lösung und Antwort finden Sie am Ende der Lektion.
Wie finde ich die Länge eines Vektors?
Wenn ein ebener Vektor angegeben ist, wird seine Länge nach der Formel berechnet.
Ist ein Raumvektor gegeben, so wird seine Länge nach der Formel berechnet ![]() .
.
Bevor wir das Konzept eines Vektorprodukts angeben, wenden wir uns der Frage nach der Orientierung eines geordneten Tripels der Vektoren a →, b →, c → im dreidimensionalen Raum zu.
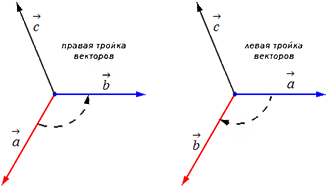
Lassen Sie uns zunächst die Vektoren a → , b → , c → von einem Punkt aus beiseite legen. Die Ausrichtung des Tripels a → , b → , c → kann je nach Richtung des Vektors c → selbst rechts oder links sein. Der Typ des Tripels a → , b → , c → wird aus der Richtung bestimmt, in der die kürzeste Drehung vom Vektor a → nach b → vom Ende des Vektors c → aus erfolgt.
Wird die kürzeste Drehung gegen den Uhrzeigersinn ausgeführt, so heißt das Vektortripel a → , b → , c → Rechts, wenn im Uhrzeigersinn – links.
Nehmen Sie als nächstes zwei nicht kollineare Vektoren a → und b →. Zeichnen wir dann die Vektoren A B → = a → und A C → = b → vom Punkt A aus. Konstruieren wir einen Vektor A D → = c →, der gleichzeitig senkrecht zu A B → und A C → steht. Wenn wir also den Vektor selbst A D → = c → konstruieren, können wir zwei Dinge tun und ihm entweder eine Richtung oder die entgegengesetzte Richtung geben (siehe Abbildung).
Ein geordnetes Tripel der Vektoren a → , b → , c → kann, wie wir herausgefunden haben, je nach Richtung des Vektors rechts oder links sein.
Aus dem Obigen können wir die Definition eines Vektorprodukts einführen. Diese Definition ist für zwei Vektoren angegeben, die in einem rechtwinkligen Koordinatensystem im dreidimensionalen Raum definiert sind.
Definition 1
Das Vektorprodukt zweier Vektoren a → und b → Wir nennen einen solchen Vektor, der in einem rechteckigen Koordinatensystem des dreidimensionalen Raums definiert ist, so dass:
- wenn die Vektoren a → und b → kollinear sind, ist es Null;
- es wird sowohl zum Vektor a → als auch zum Vektor b → senkrecht sein, d. h. ∠ a → c → = ∠ b → c → = π 2 ;
- seine Länge wird durch die Formel bestimmt: c → = a → · b → · sin ∠ a → , b → ;
- Das Vektortripel a → , b → , c → hat die gleiche Orientierung wie das gegebene Koordinatensystem.
Vektorgrafiken Vektoren a → und b → hat die folgende Notation: a → × b → .
Koordinaten des Vektorprodukts
Da jeder Vektor bestimmte Koordinaten im Koordinatensystem hat, können wir eine zweite Definition eines Vektorprodukts einführen, die es uns ermöglicht, seine Koordinaten anhand der gegebenen Koordinaten der Vektoren zu ermitteln.
Definition 2
In einem rechteckigen Koordinatensystem des dreidimensionalen Raums Vektorprodukt zweier Vektoren a → = (a x ; a y ; a z) und b → = (b x ; b y ; b z) heißt ein Vektor c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , wobei i → , j → , k → Koordinatenvektoren sind.
Das Kreuzprodukt kann als Determinante dargestellt werden quadratische Matrix dritter Ordnung, wobei die erste Zeile die Vektoren des Vektors i → , j → , k → enthält, die zweite Zeile die Koordinaten des Vektors a → enthält und die dritte Zeile die Koordinaten des Vektors b → in einem gegebenen Rechteck enthält Koordinatensystem sieht diese Determinante der Matrix so aus: c → = a → × b → = i → j → k → a x a y a z b x b y b z
Wenn wir diese Determinante auf die Elemente der ersten Zeile erweitern, erhalten wir die Gleichheit: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z · i → - a x a z b x b z · j → + a x a y b x b y · k → = = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Eigenschaften eines Kreuzprodukts
Es ist bekannt, dass das Vektorprodukt in Koordinaten als Determinante der Matrix dargestellt wird c → = a → × b → = i → j → k → a x a y a z b x b y b z , dann auf der Basis Eigenschaften der Matrixdeterminante Folgendes wird angezeigt Eigenschaften eines Vektorprodukts:
- Antikommutativität a → × b → = - b → × a → ;
- Distributivität a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → oder a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- Assoziativität λ a → × b → = λ a → × b → oder a → × (λ b →) = λ a → × b →, wobei λ eine beliebige reelle Zahl ist.
Für diese Eigenschaften gibt es einfache Beweise.
Als Beispiel können wir die antikommutative Eigenschaft eines Vektorprodukts beweisen.
Beweis der Antikommutativität
Per Definition ist a → × b → = i → j → k → a x a y a z b x b y b z und b → × a → = i → j → k → b x b y b z a x a y a z . Und wenn zwei Zeilen der Matrix vertauscht werden, sollte sich der Wert der Determinante der Matrix ins Gegenteil ändern, also a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , was beweist, dass das Vektorprodukt antikommutativ ist.
Vektorprodukt - Beispiele und Lösungen
In den meisten Fällen gibt es drei Arten von Problemen.
Bei Problemen der ersten Art werden normalerweise die Längen zweier Vektoren und der Winkel zwischen ihnen angegeben, und Sie müssen die Länge des Vektorprodukts ermitteln. Verwenden Sie in diesem Fall die folgende Formel c → = a → · b → · sin ∠ a → , b → .
Beispiel 1
Finden Sie die Länge des Vektorprodukts der Vektoren a → und b →, wenn Sie a → = 3, b → = 5, ∠ a →, b → = π 4 kennen.
Lösung
Indem wir die Länge des Vektorprodukts der Vektoren a → und b → bestimmen, lösen wir dieses Problem: a → × b → = a → · b → · sin ∠ a → , b → = 3 · 5 · sin π 4 = 15 2 2 .
Antwort: 15 2 2 .
Probleme der zweiten Art beziehen sich auf die Koordinaten von Vektoren, in ihnen auf das Vektorprodukt, seine Länge usw. durchsucht anhand bekannter Koordinaten gegebene Vektoren a → = (a x; a y; a z) Und b → = (b x ; b y ; b z) .
Für diese Art von Problem können Sie viele Aufgabenoptionen lösen. Beispielsweise können nicht die Koordinaten der Vektoren a → und b → angegeben werden, sondern deren Entwicklungen in Koordinatenvektoren der Form b → = b x · i → + b y · j → + b z · k → und c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →, oder Vektoren a → und b → können durch die Koordinaten ihres Starts angegeben werden und Endpunkte.
Betrachten Sie die folgenden Beispiele.
Beispiel 2
In einem rechteckigen Koordinatensystem sind zwei Vektoren gegeben: a → = (2; 1; - 3), b → = (0; - 1; 1). Finden Sie ihr Kreuzprodukt.
Lösung
Nach der zweiten Definition finden wir das Vektorprodukt zweier Vektoren in gegebenen Koordinaten: a → × b → = (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + ( a x · b y - a y · b x) · k → = = (1 · 1 - (- 3) · (- 1)) · i → + ((- 3) · 0 - 2 · 1) · j → + (2 · (- 1) - 1 · 0) · k → = = - 2 i → - 2 j → - 2 k → .
Wenn wir das Vektorprodukt als Determinante der Matrix schreiben, dann ist die Lösung dieses Beispiel sieht so aus: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
Antwort: a → × b → = - 2 i → - 2 j → - 2 k → .
Beispiel 3
Ermitteln Sie die Länge des Vektorprodukts der Vektoren i → - j → und i → + j → + k →, wobei i →, j →, k → die Einheitsvektoren des rechtwinkligen kartesischen Koordinatensystems sind.
Lösung
Suchen wir zunächst die Koordinaten eines gegebenen Vektorprodukts i → - j → × i → + j → + k → in einem gegebenen rechtwinkligen Koordinatensystem.
Es ist bekannt, dass die Vektoren i → - j → und i → + j → + k → die Koordinaten (1; - 1; 0) bzw. (1; 1; 1) haben. Finden wir die Länge des Vektorprodukts mithilfe der Determinante der Matrix, dann gilt i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
Daher hat das Vektorprodukt i → - j → × i → + j → + k → Koordinaten (- 1 ; - 1 ; 2) im gegebenen Koordinatensystem.
Wir ermitteln die Länge des Vektorprodukts mithilfe der Formel (siehe Abschnitt zum Ermitteln der Länge eines Vektors): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
Antwort: i → - j → × i → + j → + k → = 6 . .
Beispiel 4
In einem rechteckigen kartesischen Koordinatensystem sind die Koordinaten von drei Punkten A (1, 0, 1), B (0, 2, 3), C (1, 4, 2) angegeben. Finden Sie gleichzeitig einen Vektor senkrecht zu A B → und A C →.
Lösung
Die Vektoren A B → und A C → haben die folgenden Koordinaten (- 1 ; 2 ; 2) bzw. (0 ; 4 ; 1). Nachdem wir das Vektorprodukt der Vektoren A B → und A C → gefunden haben, ist es offensichtlich, dass es per Definition ein senkrechter Vektor sowohl zu A B → als auch zu A C → ist, das heißt, es ist eine Lösung für unser Problem. Finden wir es A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
Antwort: - 6 i → + j → - 4 k → . - einer der senkrechten Vektoren.
Probleme des dritten Typs konzentrieren sich auf die Verwendung der Eigenschaften des Vektorprodukts von Vektoren. Nach deren Anwendung erhalten wir eine Lösung für das gegebene Problem.
Beispiel 5
Die Vektoren a → und b → stehen senkrecht aufeinander und ihre Längen betragen 3 bzw. 4. Finden Sie die Länge des Vektorprodukts 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → .
Lösung
Durch die Verteilungseigenschaft eines Vektorprodukts können wir schreiben: 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
Durch die Eigenschaft der Assoziativität entnehmen wir die numerischen Koeffizienten aus dem Vorzeichen der Vektorprodukte im letzten Ausdruck: 3 · a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → = = 3 · a → × a → + 3 · (- 2) · a → × b → + (- 1) · b → × a → + (- 1) · (- 2) · b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Die Vektorprodukte a → × a → und b → × b → sind gleich 0, da a → × a → = a → · a → · sin 0 = 0 und b → × b → = b → · b → · sin 0 = 0, dann 3 · a → × a → - 6 · a → × b → - b → × a → + 2 · b → × b → = - 6 · a → × b → - b → × a → . .
Aus der Antikommutativität des Vektorprodukts folgt - 6 · a → × b → - b → × a → = - 6 · a → × b → - (- 1) · a → × b → = - 5 · a → × b → . .
Unter Verwendung der Eigenschaften des Vektorprodukts erhalten wir die Gleichung 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Gemäß der Bedingung sind die Vektoren a → und b → senkrecht, d. h. der Winkel zwischen ihnen ist gleich π 2. Jetzt müssen nur noch die gefundenen Werte in die entsprechenden Formeln eingesetzt werden: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → · sin (a → , b →) = 5 · 3 · 4 · sin π 2 = 60 .
Antwort: 3 a → - b → × a → - 2 b → = 60.
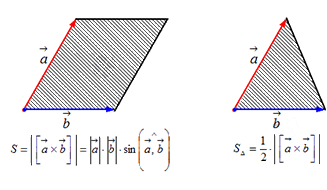
Die Länge des Vektorprodukts von Vektoren ist per Definition gleich a → × b → = a → · b → · sin ∠ a → , b → . Denn es ist bereits (aus dem Schulkurs) bekannt, dass die Fläche eines Dreiecks gleich der Hälfte des Produkts der Längen seiner beiden Seiten multipliziert mit dem Sinus des Winkels zwischen diesen Seiten ist. Folglich ist die Länge des Vektorprodukts gleich der Fläche des Parallelogramms – eines doppelten Dreiecks, nämlich dem Produkt der Seiten in Form der Vektoren a → und b →, die von einem Punkt aus durch den Sinus von gelegt werden der Winkel zwischen ihnen sin ∠ a →, b →.
Das ist es geometrische Bedeutung Vektorprodukt.
Physikalische Bedeutung des Vektorprodukts
In der Mechanik, einem Zweig der Physik, kann man dank des Vektorprodukts das Moment einer Kraft relativ zu einem Punkt im Raum bestimmen.
Definition 3
Unter dem Kraftmoment F →, das auf Punkt B relativ zu Punkt A ausgeübt wird, verstehen wir das folgende Vektorprodukt A B → × F →.
Wenn Sie einen Fehler im Text bemerken, markieren Sie ihn bitte und drücken Sie Strg+Eingabetaste
Definition. Das Vektorprodukt des Vektors a (Multiplikand) und eines nichtkollinearen Vektors (Multiplikand) ist der dritte Vektor c (Produkt), der wie folgt aufgebaut ist:
1) sein Modul ist numerisch gleich der Fläche Parallelogramm in Abb. 155), auf Vektoren aufgebaut, d.h. es ist gleich der Richtung senkrecht zur Ebene des erwähnten Parallelogramms;
3) In diesem Fall wird die Richtung des Vektors c (aus zwei möglichen) so gewählt, dass die Vektoren c ein rechtshändiges System bilden (§ 110).
Bezeichnung: oder
Ergänzung zur Definition. Wenn die Vektoren kollinear sind und die Figur (bedingt) als Parallelogramm betrachtet wird, ist es natürlich, der Fläche Null zuzuweisen. Daher wird das Vektorprodukt kollinearer Vektoren als gleich dem Nullvektor betrachtet.

Da dem Nullvektor jede Richtung zugeordnet werden kann, steht diese Vereinbarung nicht im Widerspruch zu den Absätzen 2 und 3 der Definition.
Anmerkung 1: Im Begriff „Kreuzprodukt“ weist das erste Wort darauf hin, dass das Ergebnis der Aktion ein Vektor ist (im Gegensatz zu Skalarprodukt; Heiraten § 104, Anmerkung 1).
Beispiel 1. Finden Sie das Vektorprodukt, bei dem sich die Hauptvektoren des rechten Koordinatensystems befinden (Abb. 156).
1. Da die Längen der Hauptvektoren einer Skaleneinheit entsprechen, ist die Fläche des Parallelogramms (Quadrats) numerisch gleich eins. Das bedeutet, dass der Modul des Vektorprodukts gleich eins ist.
2. Da die Senkrechte zur Ebene eine Achse ist, ist das gewünschte Vektorprodukt ein Vektor, kollinear zum Vektor Zu; und da beide den Modulus 1 haben, ist das gewünschte Vektorprodukt entweder gleich k oder -k.
3. Von diesen beiden möglichen Vektoren muss der erste gewählt werden, da die Vektoren k ein rechtshändiges System bilden (und die Vektoren ein linkshändiges System).
Beispiel 2. Finden Sie das Kreuzprodukt
Lösung. Wie in Beispiel 1 schließen wir daraus, dass der Vektor entweder gleich k oder -k ist. Aber jetzt müssen wir -k wählen, da die Vektoren ein rechtshändiges System bilden (und Vektoren ein linkshändiges System). Also,
Beispiel 3. Vektoren haben eine Länge von 80 bzw. 50 cm und bilden einen Winkel von 30°. Nehmen Sie den Meter als Längeneinheit und ermitteln Sie die Länge des Vektorprodukts a

Lösung. Die Fläche eines aus Vektoren aufgebauten Parallelogramms ist gleich. Die Länge des gewünschten Vektorprodukts ist gleich
Beispiel 4. Ermitteln Sie die Länge des Vektorprodukts derselben Vektoren, wobei Zentimeter als Längeneinheit verwendet werden.
Lösung. Da die Fläche eines aus Vektoren aufgebauten Parallelogramms gleich ist, beträgt die Länge des Vektorprodukts 2000 cm, d.h.
Aus einem Vergleich der Beispiele 3 und 4 wird deutlich, dass die Länge des Vektors nicht nur von den Längen der Faktoren abhängt, sondern auch von der Wahl der Längeneinheit.
Physikalische Bedeutung eines Vektorprodukts. Von den vielen physikalische Quantitäten, dargestellt durch das Vektorprodukt, betrachten wir nur das Kraftmoment.
Sei A der Kraftangriffspunkt. Das Kraftmoment relativ zum Punkt O wird als Vektorprodukt bezeichnet. Da der Modul dieses Vektorprodukts numerisch gleich der Fläche des Parallelogramms ist (Abb. 157). Der Modul des Moments ist gleich dem Produkt aus Basis und Höhe, d. h. der Kraft multipliziert mit dem Abstand vom Punkt O zur Geraden, entlang derer die Kraft wirkt.
In der Mechanik ist das für das Gleichgewicht bewiesen solide Es ist notwendig, dass nicht nur die Summe der Vektoren, die die auf den Körper ausgeübten Kräfte darstellen, gleich Null ist, sondern auch die Summe der Kraftmomente. Wenn alle Kräfte parallel zu einer Ebene verlaufen, kann die Addition von Vektoren, die Momente darstellen, durch Addition und Subtraktion ihrer Beträge ersetzt werden. Bei willkürlichen Kraftrichtungen ist ein solcher Ersatz jedoch unmöglich. Demnach wird das Vektorprodukt genau als Vektor und nicht als Zahl definiert.

7.1. Definition von Kreuzprodukt
Drei nichtkoplanare Vektoren a, b und c bilden in der angegebenen Reihenfolge ein rechtshändiges Triplett, wenn vom Ende des dritten Vektors c aus die kürzeste Drehung vom ersten Vektor a zum zweiten Vektor b beobachtet wird gegen den Uhrzeigersinn sein, und ein linkshändiges Triplett, wenn im Uhrzeigersinn (siehe Abb. . 16).
Das Kreuzprodukt von Vektor a und Vektor b wird Vektor c genannt, der:
1. Senkrecht zu den Vektoren a und b, d. h. c ^ a und c ^ B ;
2. Hat eine Länge, die numerisch der Fläche eines Parallelogramms entspricht, das auf den Vektoren a und aufgebaut istB wie an den Seiten (siehe Abb. 17), d.h.
3. Die Vektoren a, b und c bilden ein rechtshändiges Tripel.


Das Kreuzprodukt wird mit a x b oder [a,b] bezeichnet. Die folgenden Beziehungen zwischen den Einheitsvektoren i ergeben sich direkt aus der Definition des Vektorprodukts: J Und k(siehe Abb. 18):
i x j = k, j x k = i, k x i = j.
Lassen Sie uns zum Beispiel das beweisen i xj =k.
1) k ^ i, k ^ J;
2) |k |=1, aber | ich x j| = |i | |J | sin(90°)=1;
3) Vektoren i, j und k bilden ein Rechtstripel (siehe Abb. 16).
7.2. Eigenschaften eines Kreuzprodukts
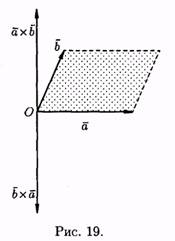
1. Beim Umordnen der Faktoren ändert das Vektorprodukt das Vorzeichen, d.h. und xb =(b xa) (siehe Abb. 19).
Die Vektoren a xb und b xa sind kollinear, haben die gleichen Module (die Fläche des Parallelogramms bleibt unverändert), sind aber entgegengesetzt gerichtet (Tripel a, b, a xb und a, b, b x a mit entgegengesetzter Ausrichtung). Das ist axb = -(b xa).
2. Das Vektorprodukt hat eine kombinierende Eigenschaft bezüglich des Skalarfaktors, d.h. l (a xb) = (l a) x b = a x (l b).
Sei l >0. Der Vektor l (a xb) steht senkrecht auf den Vektoren a und b. Vektor ( l Axt B ist auch senkrecht zu den Vektoren a und B(Vektoren a, l liegen aber in der gleichen Ebene). Das bedeutet, dass die Vektoren l(ein xb) und ( l Axt B kollinear. Es ist offensichtlich, dass ihre Richtungen übereinstimmen. Sie haben die gleiche Länge:
Deshalb l(a xb)= l ein xb. Es wird auf ähnliche Weise bewiesen für l<0.
3. Zwei Nicht-Null-Vektoren a und B sind genau dann kollinear, wenn ihr Vektorprodukt gleich dem Nullvektor ist, d. h. a ||b<=>und xb =0.

Insbesondere i *i =j *j =k *k =0 .
4. Das Vektorprodukt hat die Verteilungseigenschaft:
(a+b) xc = a xc + B xs.
Wir akzeptieren ohne Nachweis.
7.3. Das Kreuzprodukt in Koordinaten ausdrücken
Wir verwenden die Kreuzprodukttabelle der Vektoren i, J und k:

wenn die Richtung des kürzesten Weges vom ersten Vektor zum zweiten mit der Richtung des Pfeils übereinstimmt, dann ist das Produkt gleich dem dritten Vektor; wenn es nicht übereinstimmt, wird der dritte Vektor mit einem Minuszeichen genommen.
Gegeben seien zwei Vektoren a =a x i +a y J+a z k und b =b x ich+b y J+b z k. Finden wir das Vektorprodukt dieser Vektoren, indem wir sie als Polynome multiplizieren (gemäß den Eigenschaften des Vektorprodukts):

![]()
Die resultierende Formel lässt sich noch kürzer schreiben:

Da die rechte Seite der Gleichheit (7.1) der Entwicklung der Determinante dritter Ordnung anhand der Elemente der ersten Zeile entspricht, ist Gleichheit (7.2) leicht zu merken.
7.4. Einige Anwendungen von Cross-Produkten
Feststellung der Kollinearität von Vektoren

Ermitteln der Fläche eines Parallelogramms und eines Dreiecks
Gemäß der Definition des Vektorprodukts von Vektoren A und B |a xb | =|a | * |b |sin g, d. h. S Paare = |a x b |. Und daher ist D S =1/2|a x b |.
Bestimmung des Kraftmoments um einen Punkt
An Punkt A soll eine Kraft wirken F =AB lassen Sie es gehen UM- irgendein Punkt im Raum (siehe Abb. 20).
Das ist aus der Physik bekannt Moment der Kraft F relativ zum Punkt UM wird als Vektor bezeichnet M, die durch den Punkt geht UM Und:
1) senkrecht zur Ebene, die durch die Punkte verläuft O, A, B;
2) numerisch gleich dem Produkt der Kraft pro Arm
3) bildet ein Rechtstripel mit den Vektoren OA und A B.
Daher ist M = OA x F.
Ermitteln der linearen Rotationsgeschwindigkeit
Geschwindigkeit v Punkt M eines starren Körpers, der sich mit Winkelgeschwindigkeit dreht w um eine feste Achse wird durch die Euler-Formel v =w xr bestimmt, wobei r =OM ist und O ein fester Punkt der Achse ist (siehe Abb. 21).